Chapter 5 Trial Operation and TuningASDA-A2R Series
Revision December, 2014
5-7
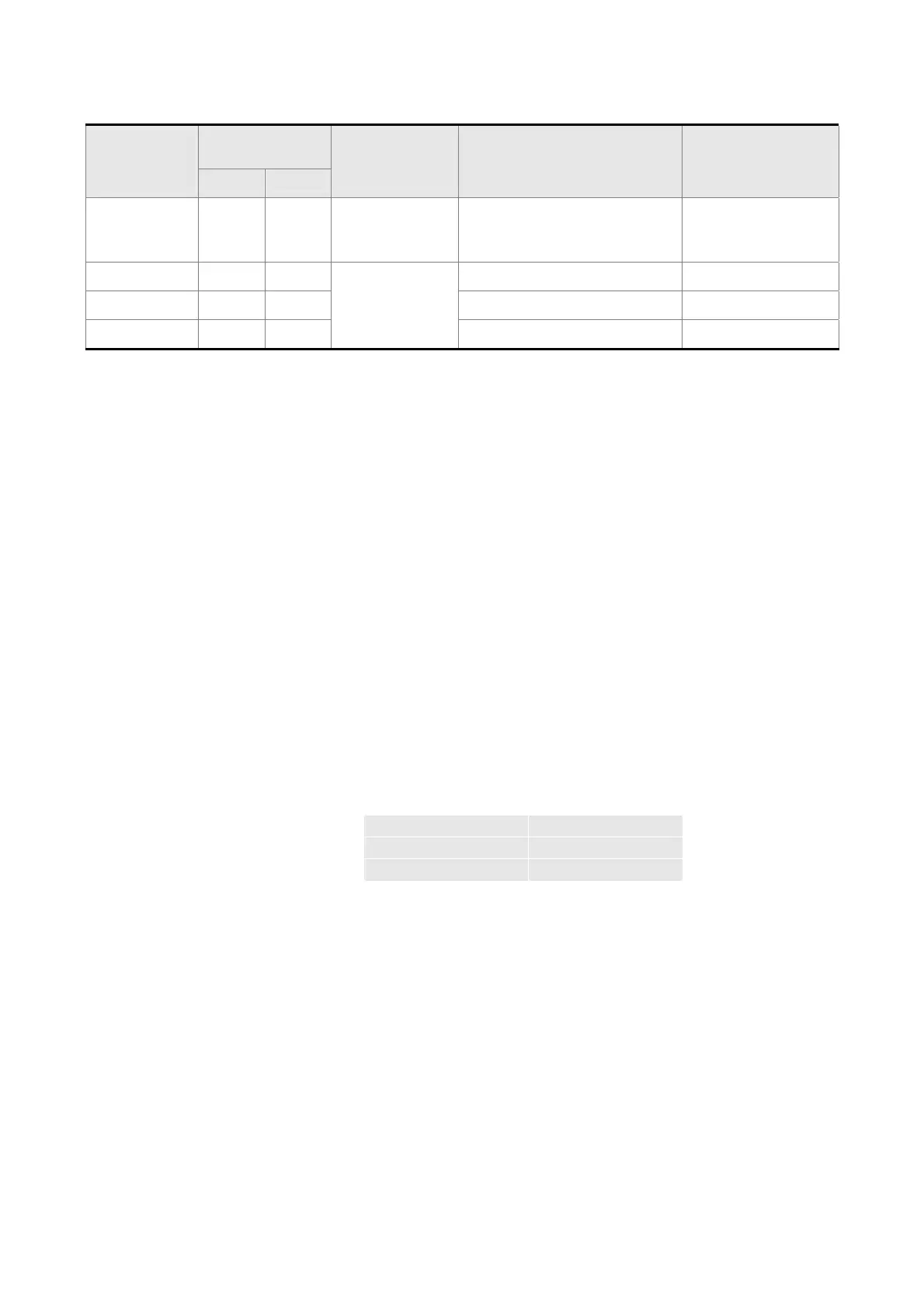
The speed command selection is determined by SPD0 and SPD1. See the table below.
Speed
Command
No.
DI signal of
CN1
Command
Source
Content Range
SPD1 SPD0
S1 0 0 External
analog
command
Voltage deviation between
V-REF and GND
-10V ~ +10V
S2 0 1
Register
parameter
P1-09 -60000 ~ 60000
S3 1 0 P1-10 -60000 ~ 60000
S4 1 1 P1-11 -60000 ~ 60000
0: means DI is OFF
1: means DI is ON
Register parameter
Permanent magnet synchronous rotary motor is -60000 ~ 60000; Setting value = setting
range x unit (0.1r/min).
Permanent magnet synchronous linear motor is -15999999 ~ 15999999; Setting value =
setting range x
sm /10
6
.
For example: P1-09 = +30000; the setting value of permanent magnet synchronous
rotary motor is +30000 x 0.1r/min = +3000r/min.
The setting value of permanent magnet synchronous linear motor =
+30000 x
s/m10
6
= 0.03m/s.
For example: P1-09 = +30000; Setting value = +30000 x 0.1r/min = +3000r/min
Command setting of speed register (Take rotary motor as the example)
Set parameter P1-09 to 30000.
Input command Rotation direction
Set parameter P1-10 to 1000. + CW
Set parameter P1-11 to -30000. - CCW
STEP 3:
(1) Users switch ON DI1 and Servo ON.
(2) Both DI3 (SPD0) and DI4 (SPD1), the speed command, are OFF, which means it
currently executes S1 command. The motor rotates according to analog voltage
command.
(3) When DI3 (SPD0) is ON, it means it currently executes S2 command (3000r/min). The
speed is 3000r/min at the moment.
(4) When DI4 (SPD1) is ON, it means it currently executes S3 command (100r/min). The
speed is 100r/min.
(5) When both DI3 (SPD0) and DI4 (SPD1) are ON, it means S4 command (-3000r/min)
is executed at the moment. The speed is -3000r/min.
 Loading...
Loading...
