Chapter 10 TroubleshootingASDA-A2R Series
Revision December, 2014
10-11
Wrong power input
(incorrect power
system)
Use the voltmeter to see if the
power system matches the
specification.
Apply to the correct power
supply or serial adaptor.
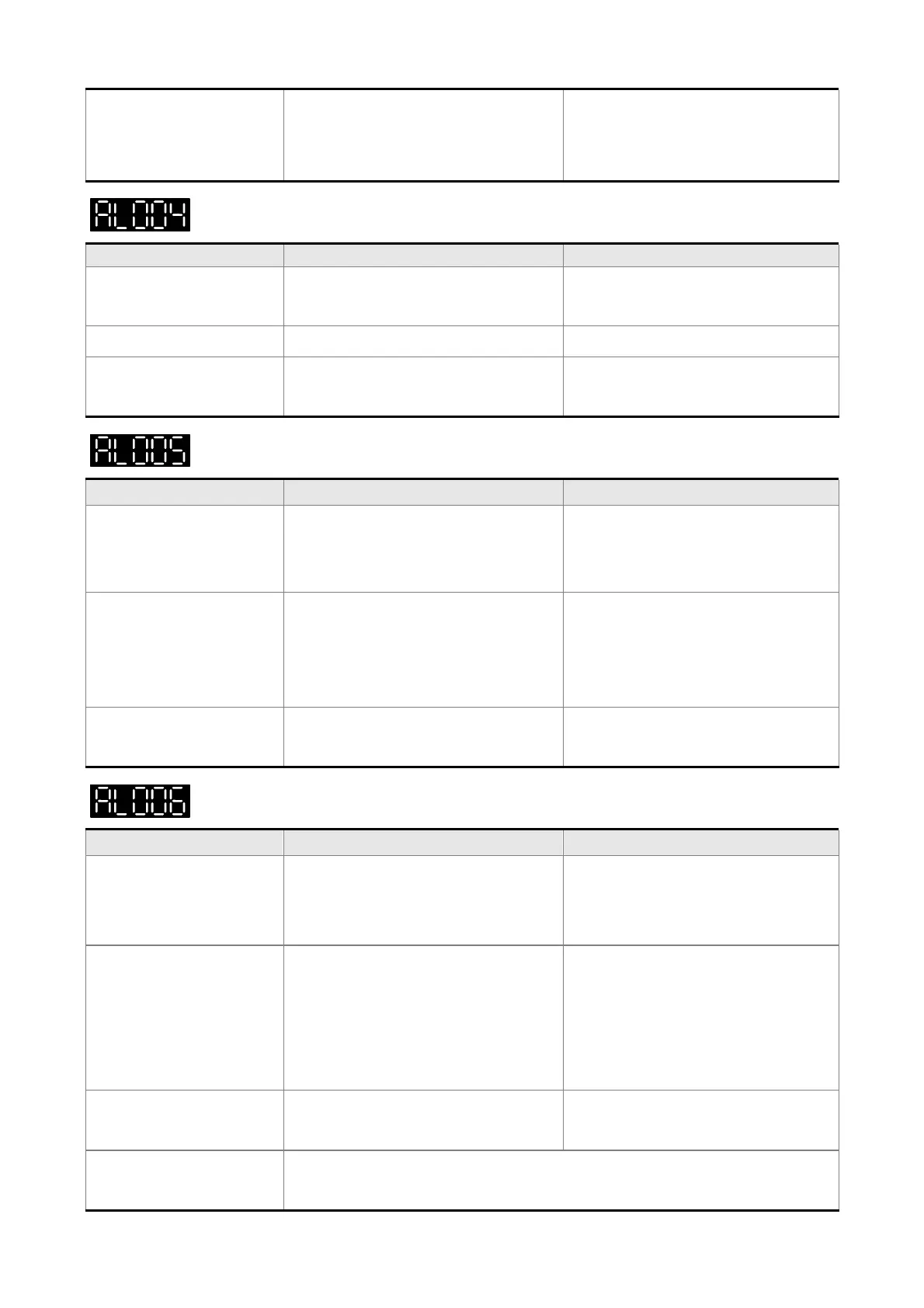
:Motor Combination Error
Causes Checking Method Corrective Actions
The encoder is
damaged.
The encoder is abnormal. Change the motor
The encoder is loose. Check the encoder connector. Install the motor again.
Motor Combination
Error
Connect to the right motor. Change the motor
:Regeneration Error
Causes Checking Method Corrective Actions
The regenerative
resistor is unconnected
or too low
Check the connection of
regenerative resistor.
Reconnect the regenerative
resistor or calculate the value of
the regenerative resistor.
Parameter P1-53 is not
set to zero when the
regenerative resistor is
not in use.
Check if parameter P1-53 of
regenerative resister is set to
zero.
Set parameter P1-53 of
regenerative resistor to zero
when it is not applying.
Wrong parameter
setting
Check the setting value of
parameter P1-52 and P1-53.
Correctly reset the setting.
:Overload
Causes Checking Method Corrective Actions
Over the rated loading
of the drive and
continuously excessive
using
Set parameter P0-02 to 11 and
see if the average torque [%] is
over 100% all the time.
Increase the motor capacity or
reduce the load.
The setting of the
control system
parameter is
inappropriate.
1. Check if there is any
mechanical vibration.
2. Check if the acceleration /
deceleration constant is set too
fast.
1. Adjust the gain value of the
control circuit.
2. Slow down the acceleration /
deceleration setting time.
Wrong wiring of the
motor and the encoder.
Check the wiring of U, V, W and
the encoder.
Correct wiring
The encoder of the
motor is defective.
Send the drive back to the distributors or contact with Delta.
 Loading...
Loading...
