Chapter 12 Setting of Motor Parameters ASDA-A2R Series
Revision December, 2014
12-13
The following common alarms are for reference.
:Auto detection of motor parameters is in error
Causes Checking Method Corrective Actions
When executing the
function of PM-01, if
the friction is too big,
motor is stuck or
entering wrong
resolution and pitch
pole, this alarm will
occur.
1. Check if motor pole pitch,
encoder resolution and
encoder type are entered
correctly.
2. Check if motor is stuck during
detection.
3. Check if the motor friction is
too big.
4. Check if the feedback of linear
scale is abnormal, the
connection is breakdown, the
scale is not installed properly
or there is noise interference.
1. Enter the value which is the
same as the actual one and
activate the detection again.
2. The rotary motor will rotate at
forward and reverse direction
for one magnetic cycle during
detection. The linear motor
will move for a pitch forward
and backward. Please
preserve the moving distance
before detection.
3. Chang another motor with
more power.
4. Correct the problem of linear
scale.
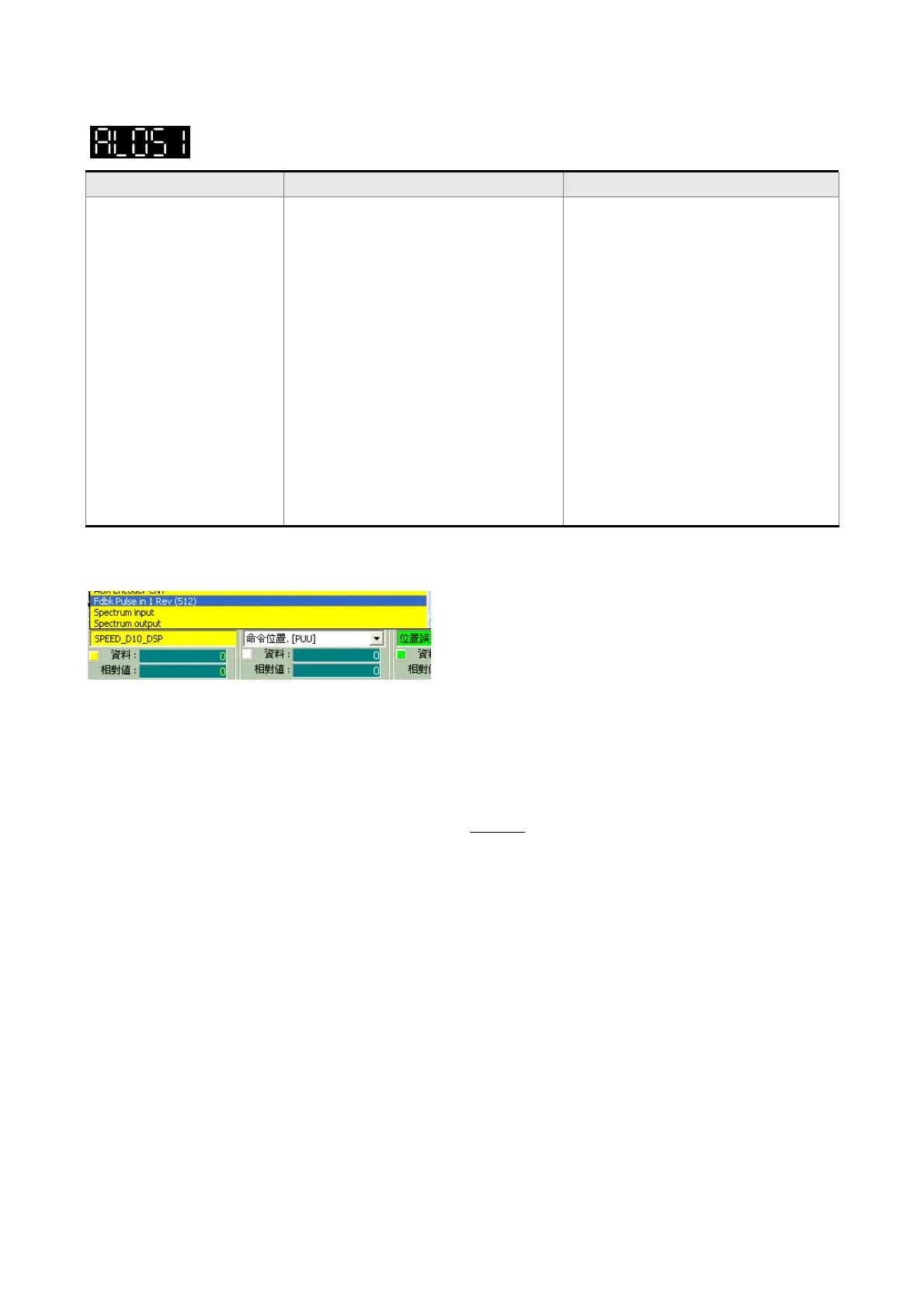
Check if the feedback of linear scale works properly through PC software.
In monitor variable mode, press the SHIFT Key to pop up the menu. Select FDBK PULSE
IN 1REV (512) and check 32BIT. This is the actual feedback pulse of linear scale
(quardruple frequency). Manually move the fixed distance of linear motor. Observe the
change of variables to see if the moving distance matches the linear scale resolution.
For example, the linear scale resolution is 1um. If the linear motor is moved for 0.1m, the
value of FDBK PULSE IN 1REV (512) will be
100000
10*1
1.0
6
pulse number.
If it has excessive error, please check if the linear scale has the problem that mentioned
above.
 Loading...
Loading...
