Chapter 7 Parameters ASDA-B2
7-4 Revision May, 2018
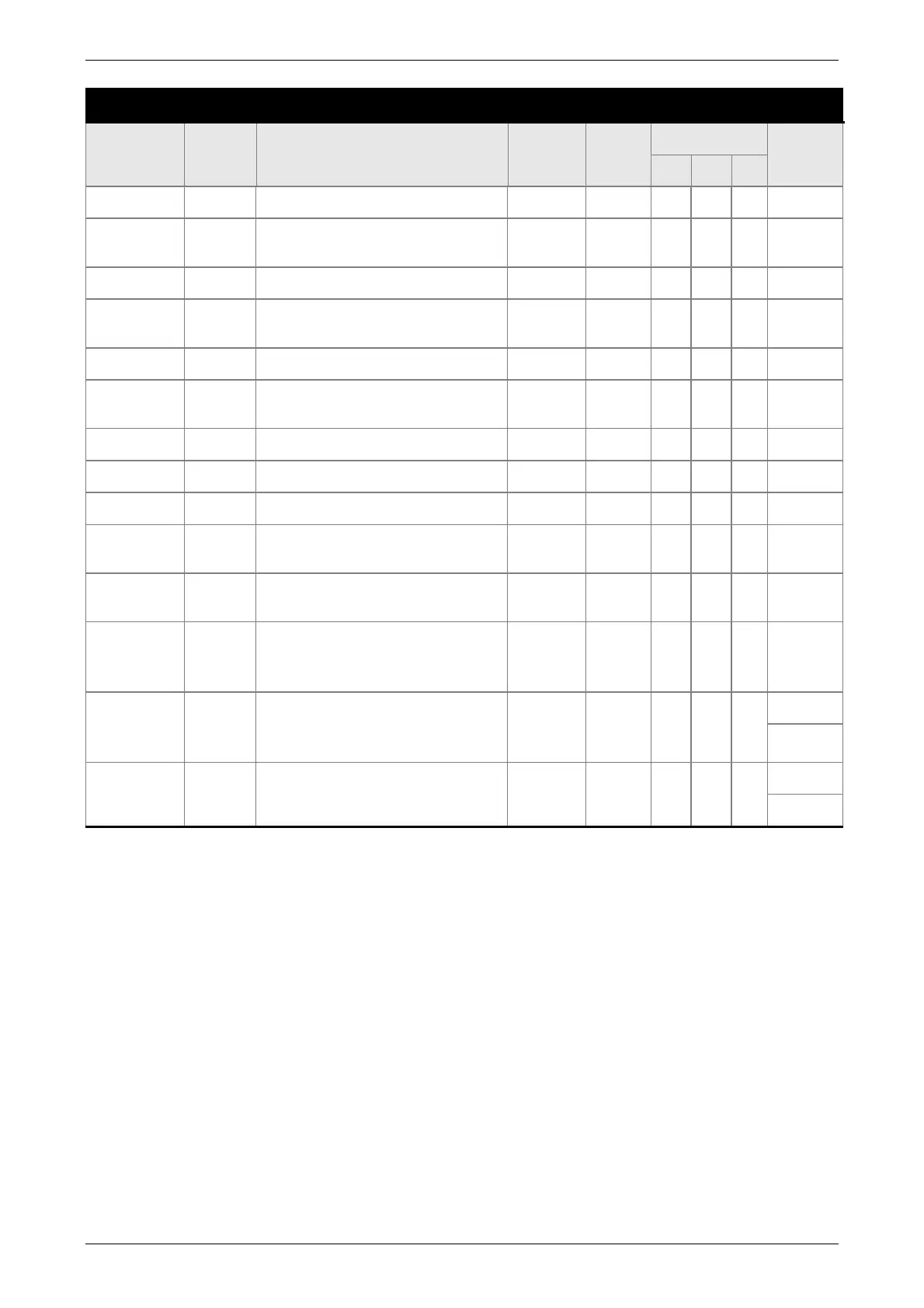
Gain and Switch Parameter
Parameter Abbr. Function Default Unit
Control Mode
Related
Section
PT S T
P2-00 KPP Position Loop Gain 35 rad/s O 6.2.5
P2-01 PPR
Switching Rate of Position
Loop Gain
100 % O 6.2.5
P2-02 PFG Position Feed Forward Gain 50 % O 6.2.5
P2-03 PFF
Smooth Constant of Position
Feed Forward Gain
5 ms O -
P2-04 KVP Speed Loop Gain 500 rad/s O O O 6.3.6
P2-05 SPR
Switching Rate of Speed
Loop Gain
100 % O O O -
P2-06 KVI Speed Integral Compensation 100 rad/s O O O 6.3.6
P2-07 KVF Speed Feed Forward Gain 0 % O O O 6.3.6
P2-26 DST Anti-interference Gain 0 0.001 O O O -
P2-27 GCC
Gain Switching and Switching
Selection
0 N/A O O O -
P2-28 GUT
Gain Switching Time
Constant
10 10ms O O O -
P2-29 GPE Gain Switching 1280000
pulse
Kpps
r/min
O O O -
P2-31 AUT1
Speed Loop Frequency
Response Setting in Auto and
Semi-auto Mode
80 Hz O O O
5.6
6.3.6
P2-32▲ AUT2 Tuning Mode Selection 0 N/A O O O
5.6
6.3.6
(★) Read-only register, e.g. parameter P0-00, P0-10 and P4-00, etc.
(▲)
Setting is invalid when Servo On, e.g. parameter P1-00, P1-46 and P2-33, etc.
()
Not effective until re-power on or off the servo drive, e.g. parameter P1-01 and
P3-00.
()
Volatile parameters, e.g. parameter P2-30 and P3-06.
 Loading...
Loading...

