Chapter 6 Control Modes of Operation ASDA-B2
6-12 Revision May, 2018
P2-02 PFG Position Feed Forward Gain
Address: 0204H
0205H
Operation
Interface:
Panel/Software Communication
Related Section:
Section 6.2.5
Default: 50
Control
Mode:
PT
Unit: %
Range: 0 ~ 100
Data Size: 16-bit
Display
Format:
Decimal
Settings: If the position command is changed smoothly, increasing the gain
value can reduce the position error. If the position command is
not changed smoothly, decreasing the gain value can tackle the
problem of mechanical vibration.
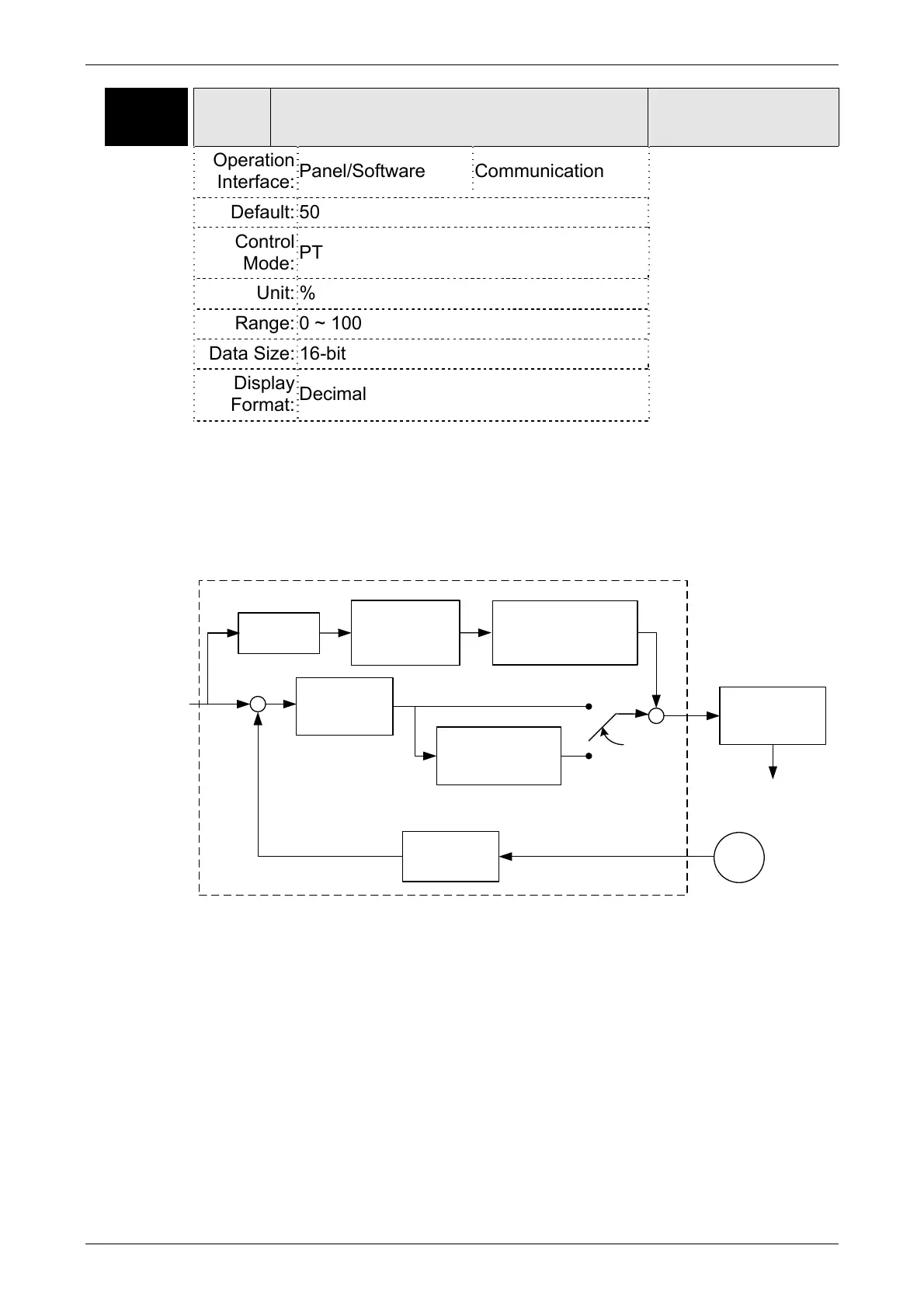
Differentiator
Position Loop
Gain
P2-00
Position Control
Gain Switching
P2-27
Speed
Command
Position Feed
Forward G ain
P2-02
Smooth Constant of
Position Feed Forward
Gain
P2-03
Switching Rate of
Position Loop
Gain
P2-01
Max. Speed Limit
P1-55
Encoder
Position Counter
+
-
+
+
+
Position
Command
When the value of proportional gain, KPP is set too big, the response bandwidth of
position loop will be increased and diminish the phase margin. And the motor rotor
rotates vibrantly in forward and reverse direction at the moment. Thus, KPP has to be
decreased until the rotor stops vibrating. When the external torque interrupts, the
over-low KPP cannot meet the demand of position deviation. In this situation,
parameter P2-02 can effectively reduce the position error.
 Loading...
Loading...


