EtherCAT Communication Card: CMM-EC02/ CMM-EC03
CMM-EC02/ CMM-EC03 Operation Manual
4.2 PDO mapping configuration
4.2.1 Default PDO mapping configuration
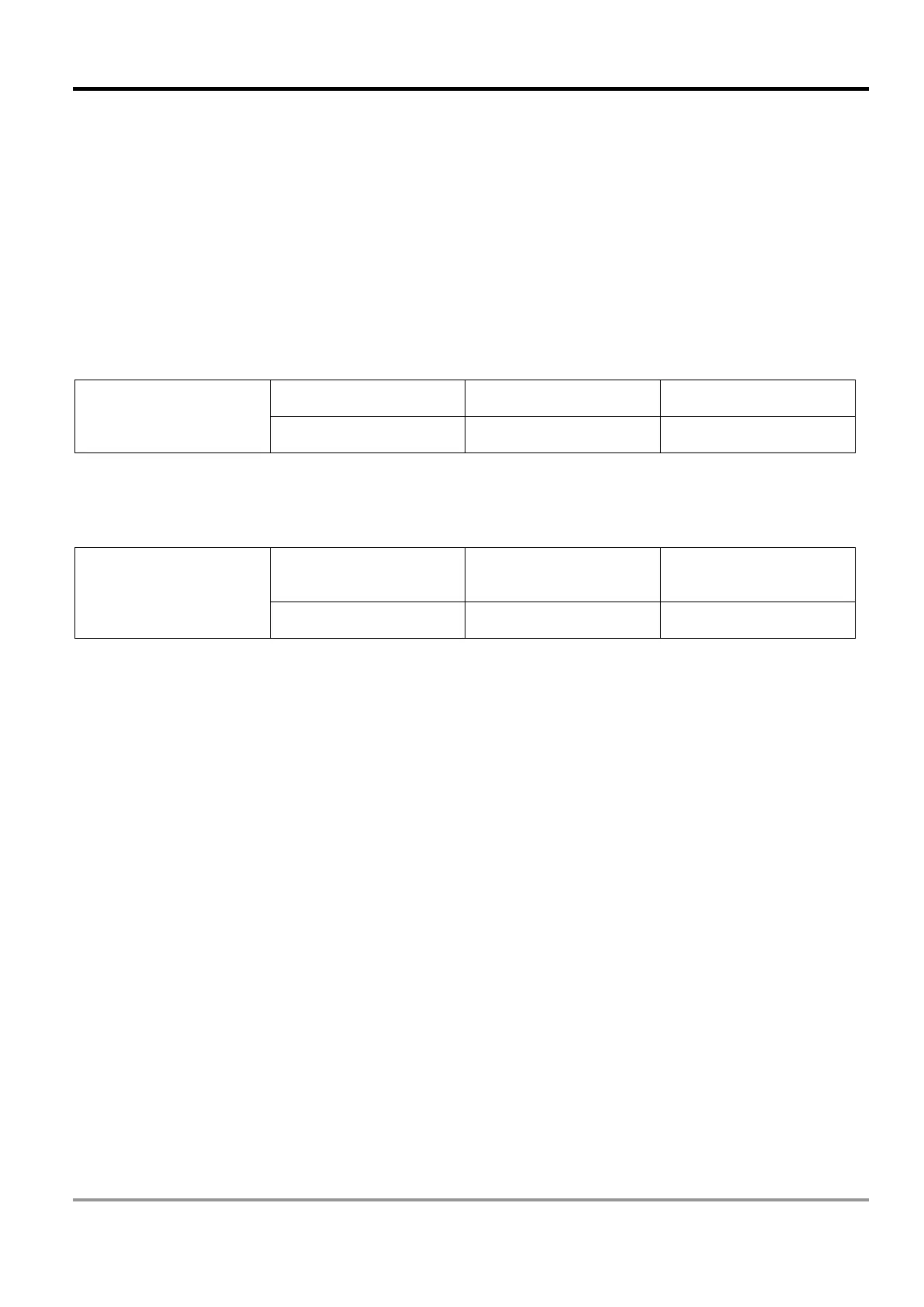
The following table shows the default PDO mapping configuration of the EtherCAT motor drive
for data exchange. This is also defined in the XML file of the EtherCAT slave. You can modify
the PDO mapping configuration according to the requirements.
RxPDO mapping
First group of RxPDO mapping in VL Mode
(0x1600)
vl target velocity
(0x6042)
Mode of Operation
(0x6060)
TxPDO mapping
First group of TxPDO mapping
(0x1A00)
(0x6041)
Display
(0x6064)
Velocity Actual Value
(0x606C)
Torque Actual Value
(0x6077)