Appendix 3 Communication Protocol 119
EV2000 Series Universal Variable Speed Drive User Manual
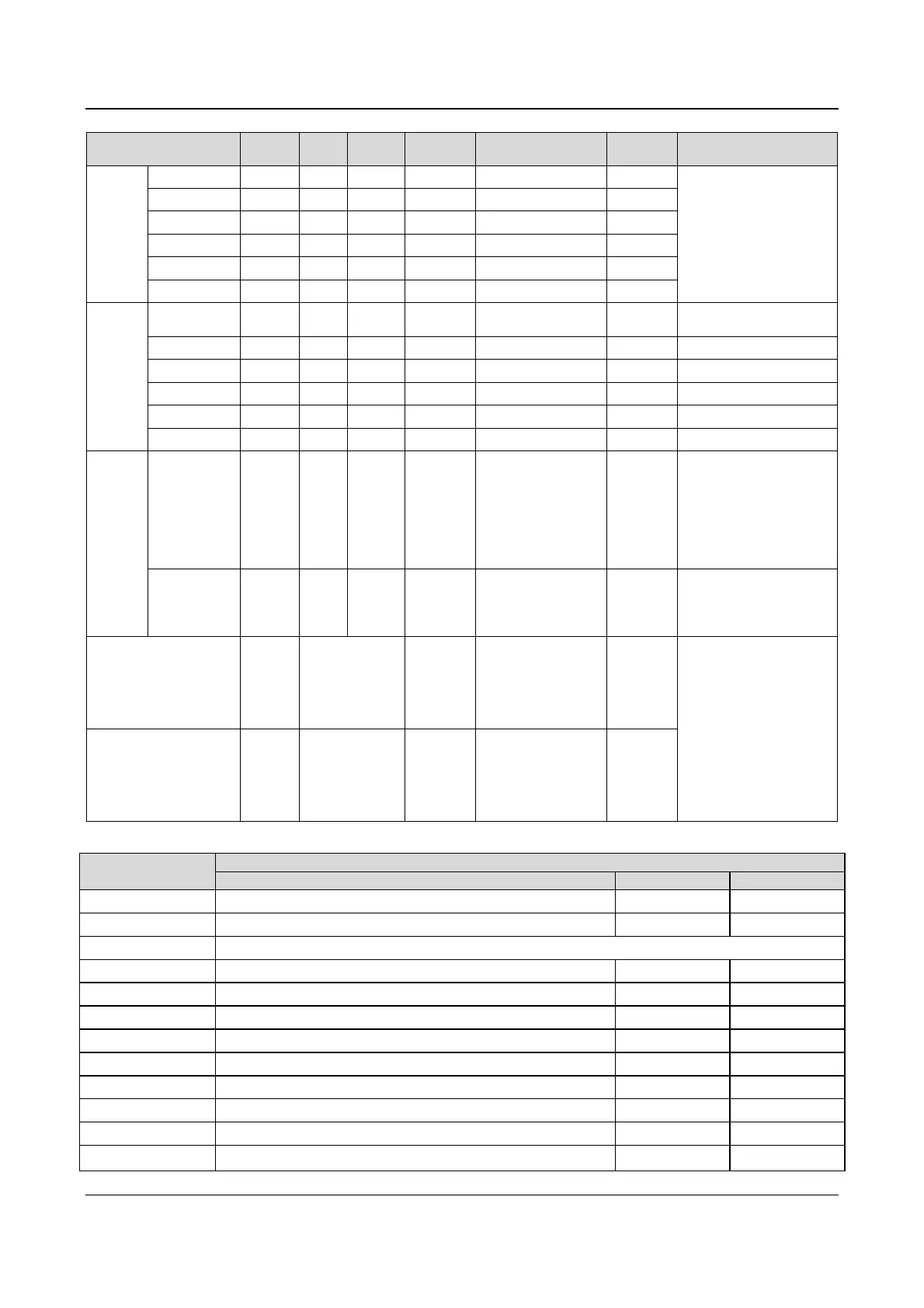
Name
Command
of master
Auxiliary
index
Command
index
Setting
range
Example Accuracy Notes
Read the parameters
(temporary functions)
F0.02
03 00 01 None ~010300010185\r 0.01 Hz
F0.04
03 00 03 None ~010300030187\r 1
F0.10
03 00 09 None ~01030009018D\r 0.1S
F0.11
03 00 0A None ~0103000A0195\r 0.1S
F5.05
03 00 66 None ~010300660190\r 0.01V
F5.06 03 00 6C None ~0103006C019D\r 1rpm
Set the parameters
(temporary functions)
F0.02 04 00 01
0~upper
freq. limit
~0104000103E80266\r 0.01 Hz
F0.02=10
.00Hz
F0.04 04 00 03 0 and 1 ~0104000300010249\r 1 Set F0.04 to reverse running
F0.10 04 00 09 0~8CA0 ~0104000900640258\r 0.1S Set F0.10 to 10.0s
F0.11 04 00 0A 0~8CA0 ~0104000A00640260\r 0.1S Set F0.11 to 10.0s
F5.05 04 00 66 0~03E8 ~0104006603E80271\r 0.01V
Set F5.05 to 10
.00V
F5.06 04 00 6C 0~9858 ~0104006C03E8027E\r 1Rpm Set F5.06 to 1000Rpm
System configuration
Configure the
response of
slave
05 00 00 0~7 ~010500000007024D\r 1
Bit0~2: whether the slave
response to the received
wrong data, invalid
command, operation control,
and adjust functions; 1:
response, 0: not response,
default is 5
Inquire the
slave’s type and
software
version
05 00 01 0~FFFF ~010500010187\r 1
12000+version number, if
the version is V1.0, then the
read value is : 12000+10
=12010, that is 2EEA
Read the parameters
(Group No.
+Index mode)
06 See table A-10 None See Table A-10 1
The usages of group 7 and
group 8 commands are
same, except that group 7
commands can write
parameters in EEPROM,
while group 8 commands
can only modify the
parameters in DSP RAM
(F0.08 and FH.01 and the
associated parameters not
included)
Read the parameters
(Group No.
+Index mode)
07(08) See table A-11 0~FFFF SeeTable A-11
Dependent
on function
codes
Table A-9 Meaning of operating status
Bit
Meaning
Description 0 1
Bit0 Stop/run status Stop Run
Bit1 Low voltage flag Normal Low voltage
Bit2~6
Reserved
Bit7 Symbol for preset counting value arriving Invalid Valid
Bit8 Symbol for specified counting value arriving Invalid Valid
Bit9 Traverse operation mode No Yes
Bit10 Forward/reverse operation mode Forward Reverse
Bit11 PI close loop operation mode No Yes
Bit12 Common operation mode No Yes
Bit13 Jog operation mode
None Jog
Bit14 PLC operation mode No Yes
Bit15 Operation at preset frequency No Yes

 Loading...
Loading...

