Safety
Information
Introduction
Product
information
System
design
Mechanical
installation
Electrical
installation
Getting
started
Optimisation
Parameters
Technical
data
Component
sizing
Diagnostics
90 Unidrive SP Regen Installation Guide
www.controltechniques.com Issue Number: 2
L is the total input inductance. This is the inductance value in Pr 3.02 (at
power-up this parameter is zero). Each time the Regen drive is enabled
the total input inductance is measured and displayed in Pr 3.02. The
value given is only approximate, and will give an indication as whether
the input inductance is correct for the sinusoidal rectifier unit size. The
measured value should include the supply inductance as well as the
Regen drives input inductors, however, the supply filter capacitance,
masks the effect of the supply inductance. Therefore the value
measured is usually the Regen drive regen inductor value.
I
fs
is the peak full-scale current feedback
I
fs
= Drive rated current x √2 / 0.45 (Drive rated current [Pr 11.32])
Vfs is the maximum DC bus voltage.
Therefore:
Pr
4.13
= Kp = (L / 167
µ
s) x (Drive rated current x
√
2 / 0.45 / Vfs) x (256 / 5)
= K x L x Rated drive current
Where:
K = √2 / (0.45 x Vfs x 167µs) x (256 / 5)
This set-up will give a step response with minimum overshoot after a
step change of current reference. The approximate performance of the
current controllers will be as given below. The proportional gain can be
increased by a factor of 1.5 giving a similar increase in bandwidth,
however, this gives a step response with approximately 12.5%
overshoot.
Table 8-1 Current loop sample times
As previously detailed the current controller integral gain, Pr 4.14 is not
so critical with the recommended value being the default setting.
8.3 Voltage controller gain (Pr 3.06)
Even when the voltage controller gain is set correctly there will be a
transient change of DC bus voltage when there is a change in the load
on any motoring drive connected to the Regen drive. This can be
reduced substantially by using an analogue input for power feed forward
compensation.
The following discussion relates to a system without power feed-forward
compensation.
If the power flow from the supply is increased (i.e. more power is taken
from the supply or less power is fed back into the supply) the DC bus
voltage will fall, but the minimum level will be limited to just below the
peak rectified level of the supply provided the maximum rating of the unit
is not exceeded.
If the power flow from the supply is reduced (i.e. less power is taken from
the supply or more power is fed back into the supply) the DC bus voltage
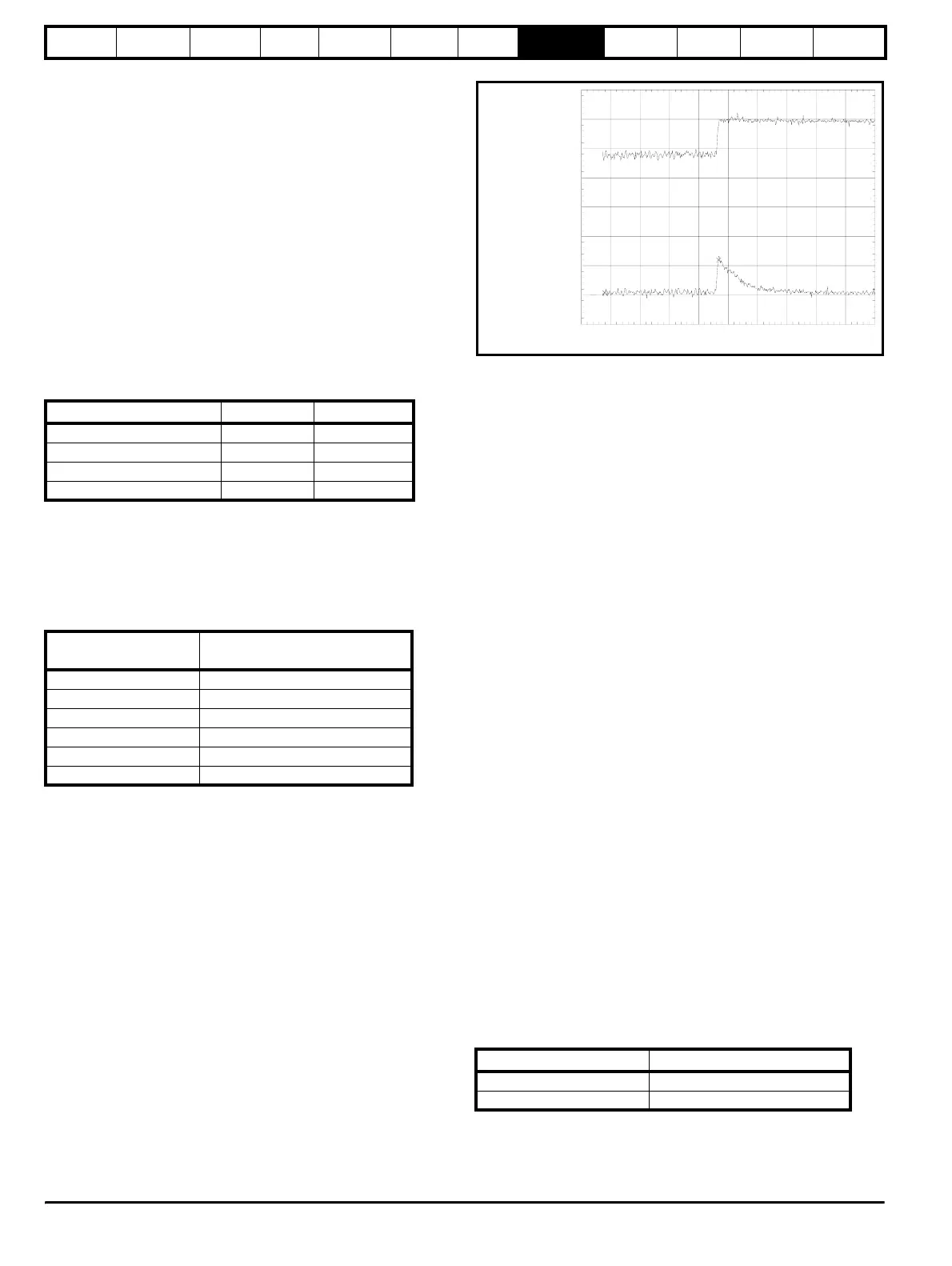
will rise. During a rapid transient the DC bus will rise and then fall as
shown in Figure 8-3 DC Bus transient .
Figure 8-3 DC Bus transient
The example shown is for a very rapid load change where the torque
reference of the motor drive has been changed instantly from one value
to another.
The proportional gain of the voltage controller, Kp, Pr 3.06, defines the
voltage transient because the integral term is too slow to have an effect.
(In applications where the motor drive is operating under speed control,
the speed controller may only require a limited rate of change of torque
demand, and so the transient voltage may be less than covered in the
discussion below.)
If the DC Bus voltage set point voltage Pr 3.05, plus the transient rise
exceed the over-voltage trip level the Regen drive will trip.
When a 400V motor is operated above base speed from a drive in
closed loop vector mode, fed from the Regen drive with the same rating,
supplying a DC voltage of 700V, and an instantaneous change of torque
is demanded (i.e. -100% to +100%) the peak of the voltage transient
(∆V) is approximately 80V if the current controllers are set up correctly
and the voltage controller uses the default gain. (Operating with
maximum voltage on the motor, i.e. above base speed, gives the biggest
transient of power and hence the biggest value of (∆V. )
If the load change, drive voltage rating, motor voltage or DC Bus voltage
set point are different then ∆V is calculated from:
∆V = 80V x K
L
x K
RAT
x K
MV
x K
SP
Where:
K
L
= Load change / 200%
K
RAT
= Drive voltage rating / 400
K
MV
= Motor voltage / 400
K
SP
= 700 / DC bus voltage set point
In some applications, particularly with a high DC bus voltage set point
and low switching frequency it may be necessary to limit the rate of
change of power flow to prevent over voltage trips. A first order filter on
the torque reference of the motor drive (Pr 4.12) is the most effective
method to reduce the transient further. (A fixed limit of the rate of change
of torque demand is less effective.) Table 8-2 Rate of change gives an
approximate indication of the reduction in ∆V for different time constants.
(As already mentioned the value of ∆V given is for an instantaneous
change of torque representing the worst case. In applications where a
speed controller is used in the motor drive the transient will already
include an inherent filter).
Table 8-2 Rate of change
The transient produced is approximately proportional to the voltage
controller gain Pr 3.06. The default voltage controller gain is set to give a
value that is suitable for most applications. The gain may need to be
increased if the DC bus capacitance is high compared to two drives of
Drive voltage rating Vfs K
200V 415V 2322
400V 830V 1161
575V 990V 973
690V 1190V 809
Switching frequency
kHz
Current control sample time (T)
µs
3 167
4 125
683
8 125
12 83
16 125
Time constant Change in ∆V
20ms x 0.75
40ms x 0.5
Regen unit
DC bus voltage
Active regen
unit current
ch3: dT= 194ms dV=2.24 V
50ms/div