Motors
The robot’s five axes and gripper are
operated by DC servo motors. The
direction of motor revolution is
determined by the polarity of the operating
voltage: positive DC voltage turns the
motor in one direction, while negative DC
voltage turns it in the opposite direction.
Each motor is fitted with an encoder for
closed-loop control.
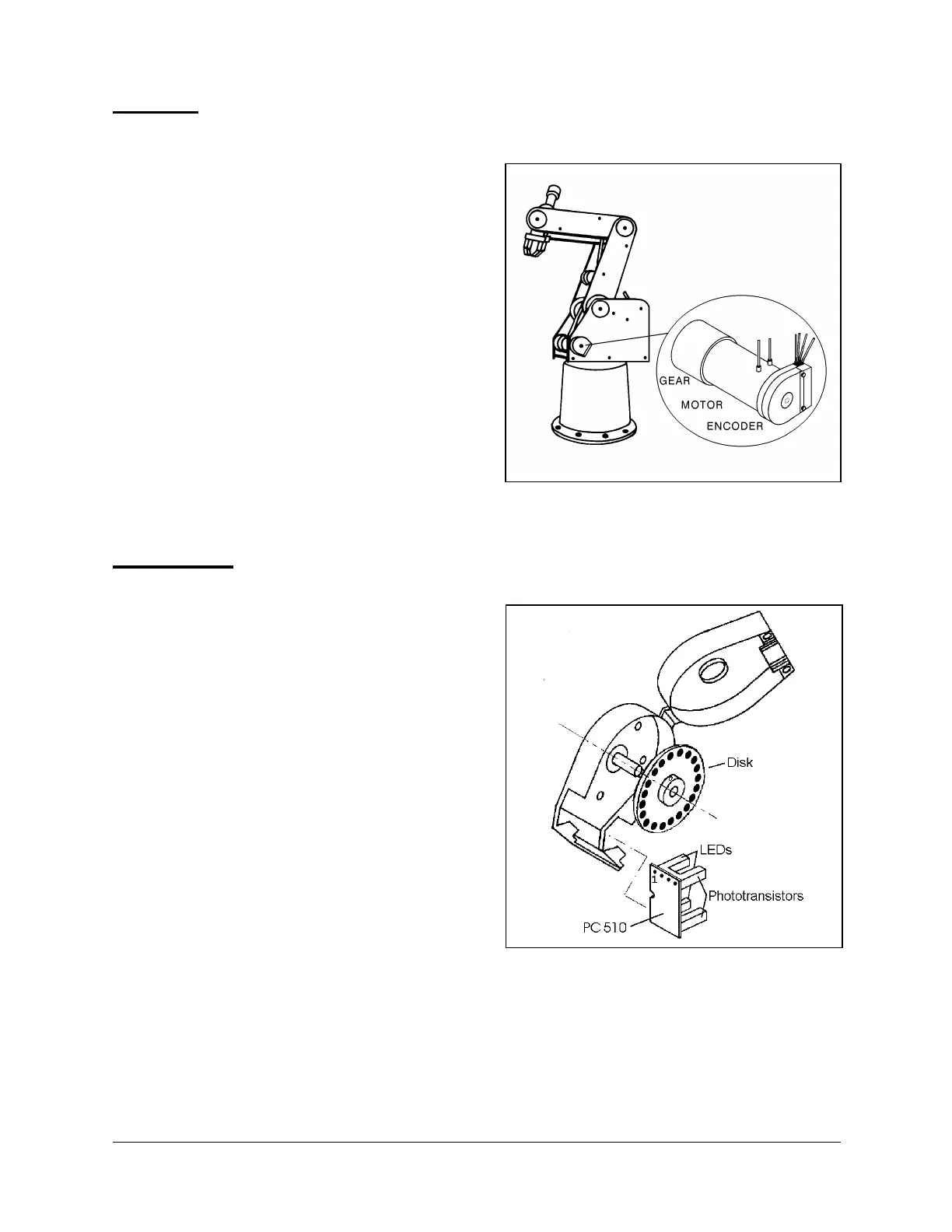
Encoders
The location and movement of each axis is
measured by an electro-optical encoder
attached to the shaft of the motor which
drives the axis.
When the robot axis moves, the encoder
generates a series of alternating high and
low electrical signals. The number of
signals is proportional to the amount of
axis motion. The sequence of the signals
indicates the direction of movement.
The controller reads these signals and
determines the extent and direction of axis
movement.
Figure 7: Encoder
Figure 8: Motor
User’s Manual 7 SCORBOT-ER 4pc
9810
 Loading...
Loading...