www.fastech.co.kr
Position Table Operation Sequence
In case of Ezi-SERVO Plus-R, the system can execute continuous operation by position
table at the I/O command mode.
① By using PT A0 ~ PT A7 input signal or DLL program, set PT number to be operated.
② In case of Servo OFF, set the controller to Servo ON by communication program or
Servo ON control input.
③ Start to operate by rising edge of PT Start input signal or communication program.
Stopping Continuous Operation of Position Table
When the motor is executing continuous operation of position table with Ezi-SERVO Plus-R,
stop executing position table by following methods.
① To use DLL program or control input signal corresponding to ‘Stop’ and ‘E-Stop’.
In this case, operation is completely finished and is not connected to next
operation.
② The user can click 「Pause」 at User Program(GUI) to temporarily stop operating. In
this case, click 「Pause」 again, and remaining operation will be executed again.
Position Control Operation
To operate the motor by parameters set by User Program(GUI) or DLL program. (This is not
connected with PT operation.)
Once position control operation is started, PT operation command is overridden. Likewise,
while PT operation is executing, position control operation command is overridden.
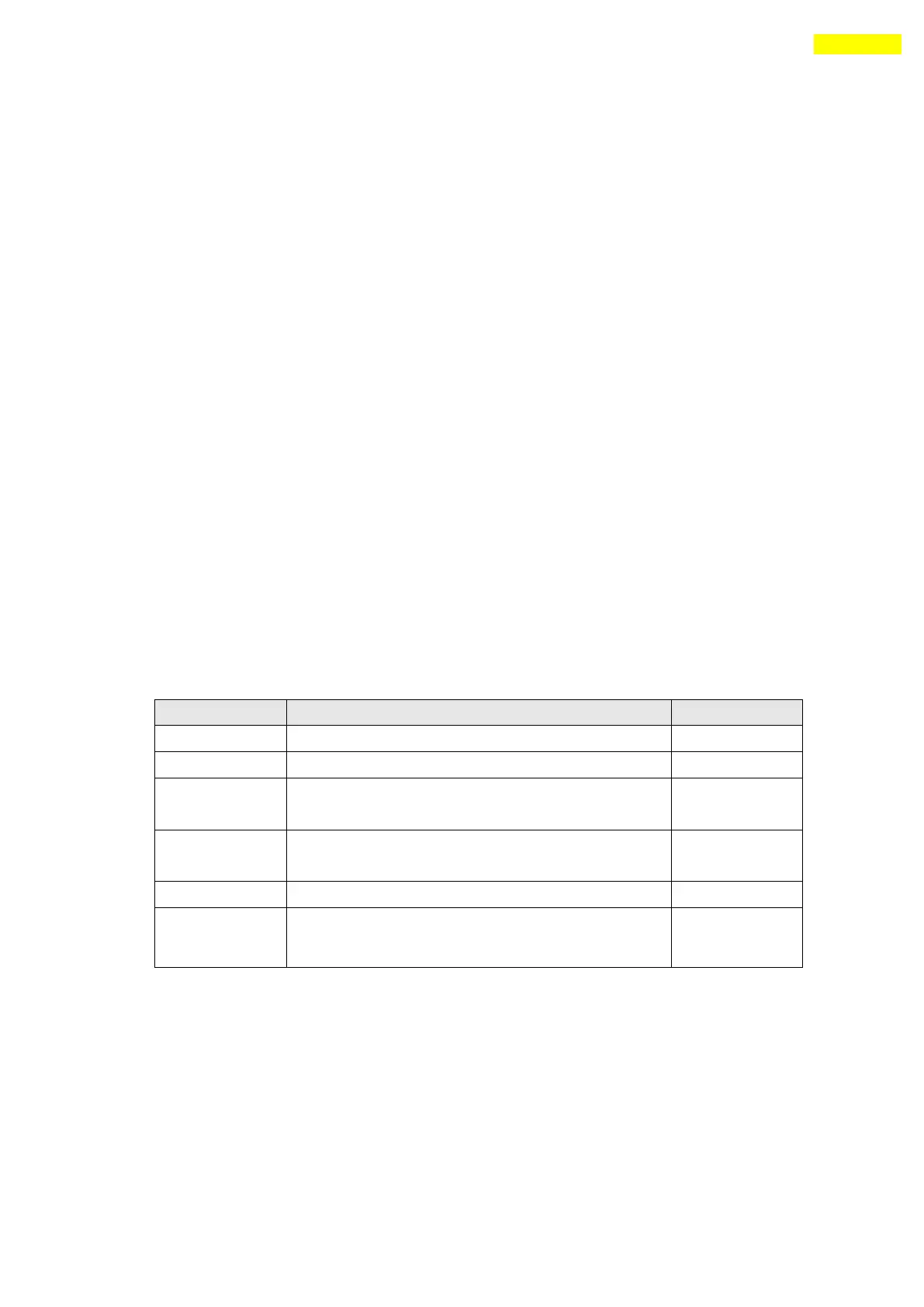
The followings show parameters applied to position control operation. All position table
item values are overridden.
Operation speed after acceleration is finished
Operation start speed before acceleration starts
Required time until the motor reaches the axis max
speed from stop status
Required time until the motor reaches from the axis
max speed to the stop status
To select motion direction (CW or CCW)
Number of pulses per revolution.
The range of ‘Axis Max Speed’parameter is depend
on this value.
Teaching Function
Teaching can be executed only by User Program(GUI). For more information, refer to
「User Manual – Position Table Function」.

 Loading...
Loading...