www.fastech.co.kr
12. Other Operation Functions
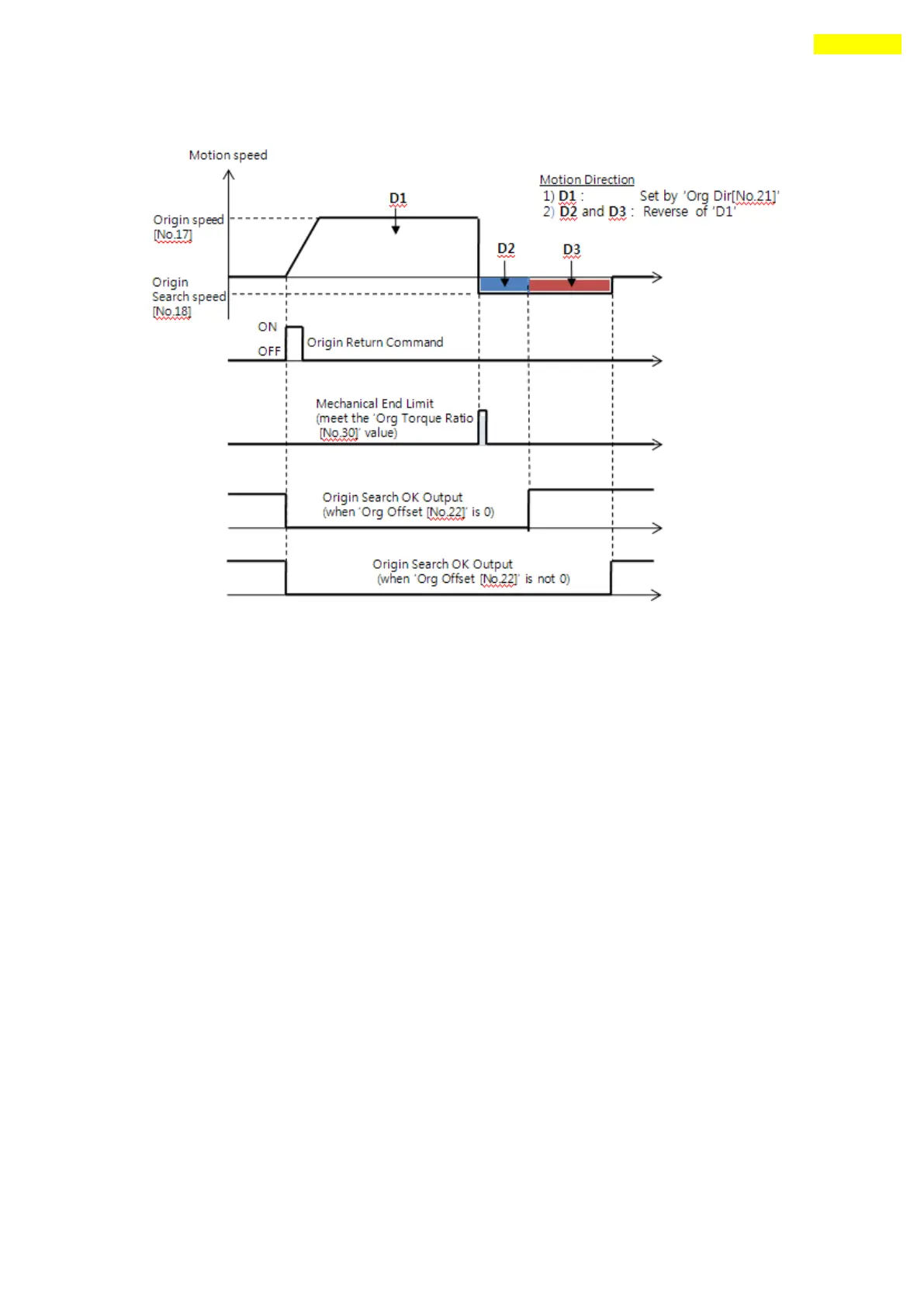
When the machine moves up to the mechanical limit by ‘Org Dir’direction,
it stop immediately and moves in reverse direction until ‘D2’ distnace.
If the ‘Org Offset’ parameter is not 0, it moves more as ‘D3’distance.
* Be careful not to contact ‘HW limit sensor’ during torque origin command.
(By HW limit sensor, the motor will stop and command is canceled)
⑤ Torque Z Origin (In case of ‘Org Method’= 4 )
After the machine moves up to ‘Torque Origin’, it moves additionally up to
meet ‘Z-pulse’ of encoder. The motioning of‘Torque Origin’is same as
Torque Origin (In case of‘Org Method’=3) and the remaining
Z-pulse motioning is same as Z-pulse Origin(In case of ‘Org Method’=1).
* In case of this, the ‘Org Search Speed’value is working under 10000[pps].
* Be careful not to contact ‘HW limit sensor’ during torque origin command.
⑥ Set Origin (In case of ‘Org Method’=5 )
Set to origin in current mechanical position without origin sensor.
(2) Origin Return Procedure
Origin return is executed according to the following procedure.
① Set parameters required to origin return.
② If the Servo is OFF, (reset an alarm when it occurs) input a control input Servo ON
command or send a communication program so that the Servo can be ON.
 Loading...
Loading...
