6 Control via FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-EN – 2017-05b – English 71
6.7.2 “Following error” message
In position and speed mode, exceeding of the max. permissible following error can be monitored, e.g.
in the case of sluggishness or overload of the drive.
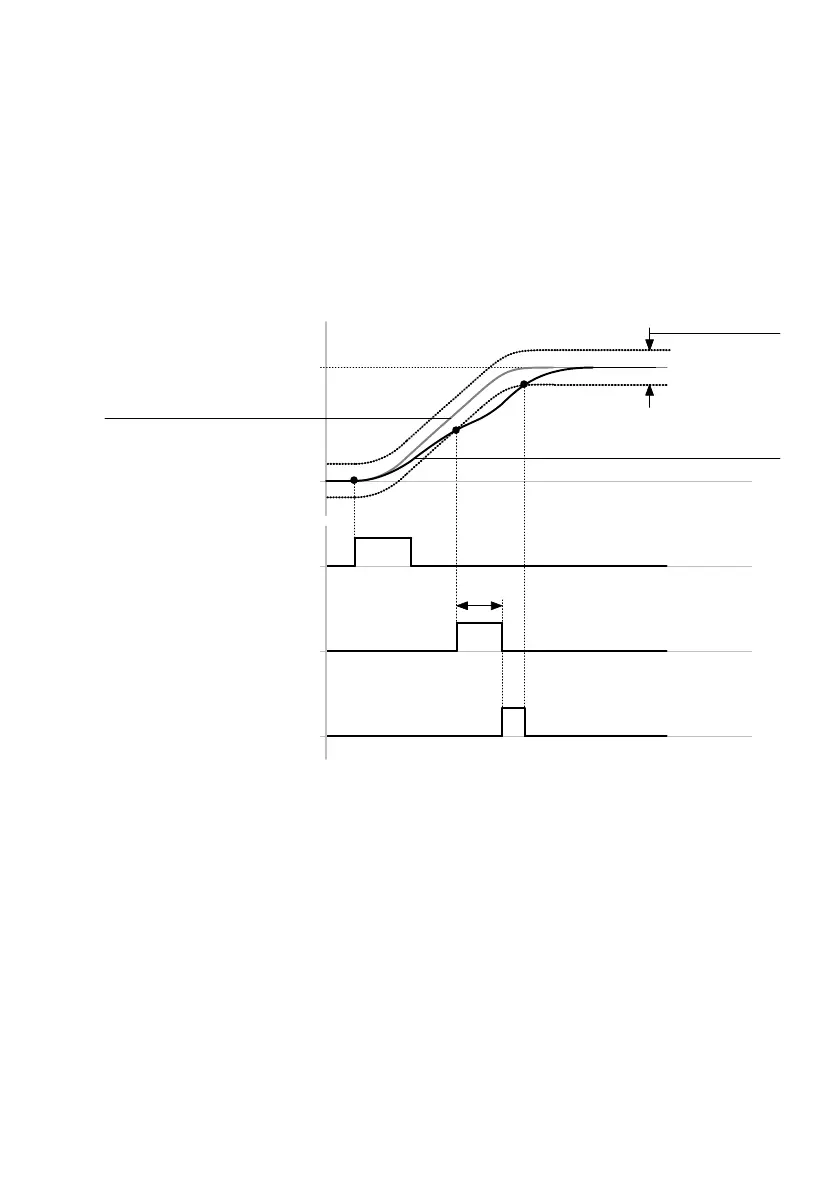
A theoretical progression is calculated from the parameters of a job before it is executed (è Fig. 6.8, 1 ).
While carrying out an order, the variance between the calculated setpoint and the current actual value is
monitored. The permitted difference (max. permissible following error) is determined in parameterisation.
The message is enabled after the damping time has expired if the difference between the setpoint and
actual value of the current controlled variable (path, speed) lies outside the permitted difference.
Target position
t1
Damping time
Start
Following error
Message 2F
h
1
2
3
s
t1: Damping time for following error
1 Setpoint positioning process
2 Max. following error – PNU 424, 549, 568
3 Actual positioning process
Fig. 6.8 Timing diagram: message “Following error” – position control example, following error pa
rameterised as warning
The error management of FCT permits parameterising the reaction to this message (2F
h
) (è FCT error
management). If the following error has been configured as a warning, the message is automatically
deleted when the actual value is again within the following error window.

 Loading...
Loading...









