FMUSER INTERNATIONAL GROUP INC. 广州市汉婷生物技术开发有限公司
46
14 Annexes
14.1 Communication Protocol Implementation Flowcharts
Following flowcharts allow the developer to implement the RDS-C ASCII protocol to any application easily.
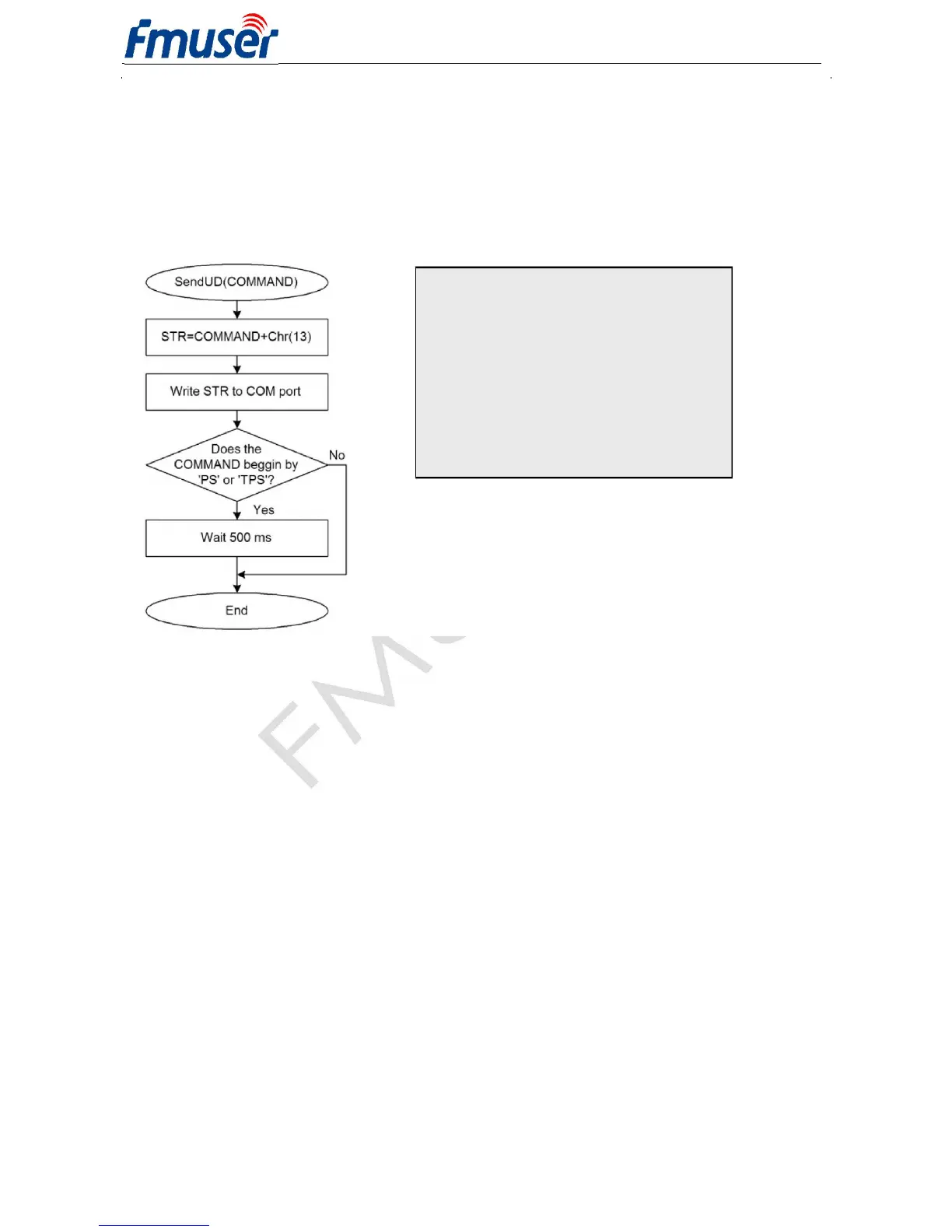
14.1.1 Unidirectional Communication
Note: This flowchart applies to firmware versions
1.4a and later. Older firmware versions require
additional delay behind all commands if two or
more commands are sent in one sequence. This
delay duration should be at least 50 ms. If the
application doesn’t include this additional delay, it
should inform the user that firmware version 1.4a
or later is recommended. The firmware upgrade
utility is free for download from the website.
The bidirectional communication flowcharts
apply to all firmware versions.
Send command basic flowchart (unidirectional communication).
14.1.2 Bidirectional Communication
Confirm sequences definition:
CS1=Chr(13)+Chr(10)+’+’+Chr(13)+Chr(10)+Chr(13)+Chr(10)
CS2=Chr(13)+Chr(10)+’!’+Chr(13)+Chr(10)+Chr(13)+Chr(10)
CS3=Chr(13)+Chr(10)+’-’+Chr(13)+Chr(10)+Chr(13)+Chr(10)
CS4=Chr(13)+Chr(10)+’/’+Chr(13)+Chr(10)+Chr(13)+Chr(10)
Variables used:
STR, REC, CS, COMMAND: string
ACCEPTED, ERROR: integer/boolean
TIME: time/float
Other values:
TIMEOUT: COM port timeout, usually ≥400 milliseconds
Calling examples:
SendBD(‘PS=PRO 88’)
if ERROR or not ACCEPTED then write(‘Error’)
S=Read(‘PS’)
if ERROR or not ACCEPTED then S=’’
Note: The flowcharts are valid for any ECHO value.