April 2022 Franka Emika GmbH © 10
5 TECHNICAL SPECIFICATIONS
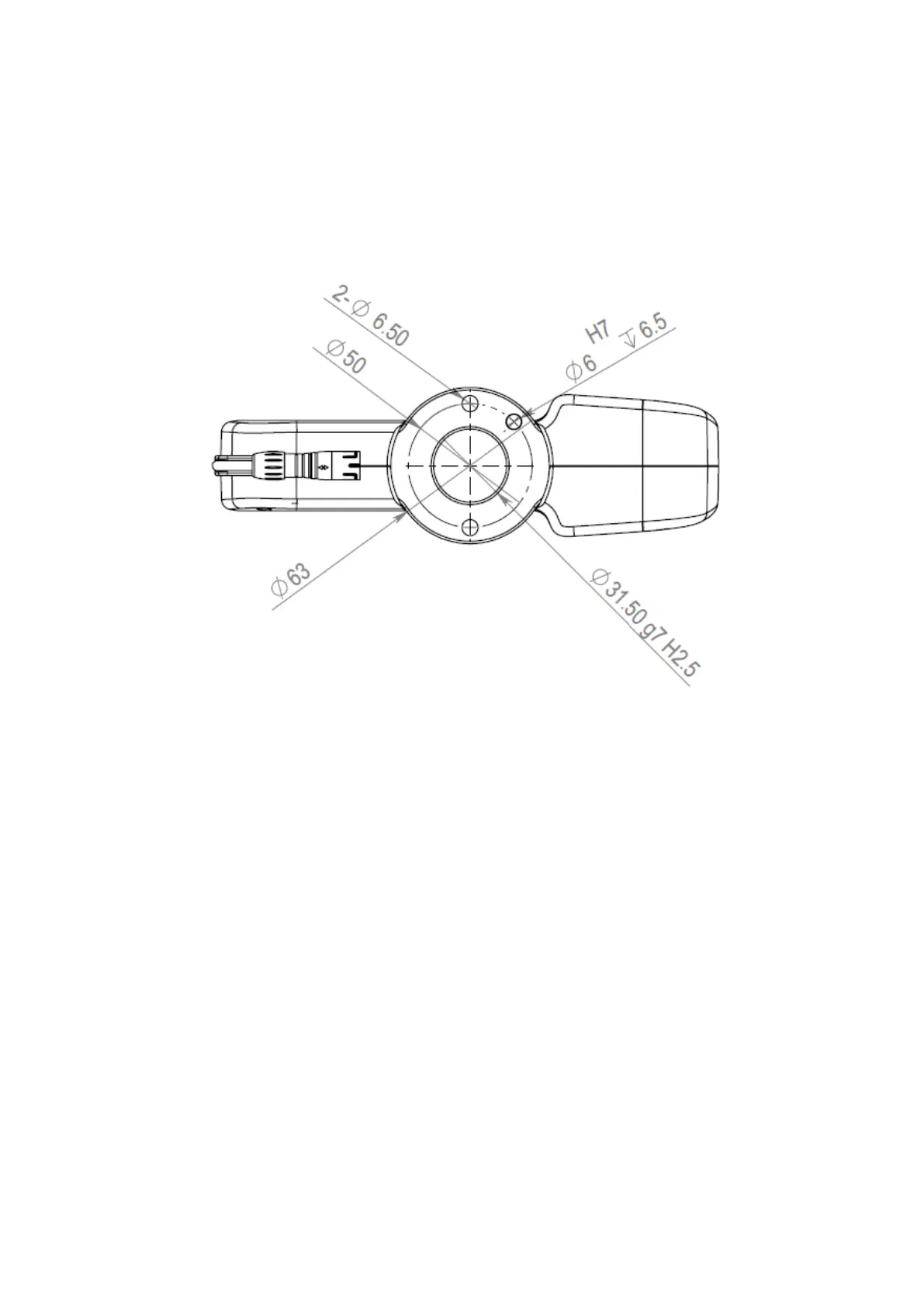
Technical drawings
Interface flange of Hand
(tightening torque for fastening the Hand to the robot: M6, quality 8.8: 9.8 Nm)
Figure 5.1
Hand to fingers interface
• Hand to fingers screws: 4x M4x12
• Thread diameter: 4 mm
• Tightening torque: 2.25 Nm.
Finger to fingertips screws: 2x DELTA PT
®
40x10 WN 5451
• Thread diameter: 4 mm
• Tightening torque: 0.3 Nm