Unexpected motions during guiding due to incorrectly configured end effectors
Incorrectly configured end effector mass and inertia may result in the gravitational forces not being fully
compensated for. The resulting and unexpected behavior of the robot including end effector may lead to
injuries such as crushing, tearing of skin, and puncturing.
• Always check the configuration of the end effector.
• When copying an already parametrized app or task to another compatible FrankaEmika robot
system, ensure that the end effector configuration is still identical to the original one.
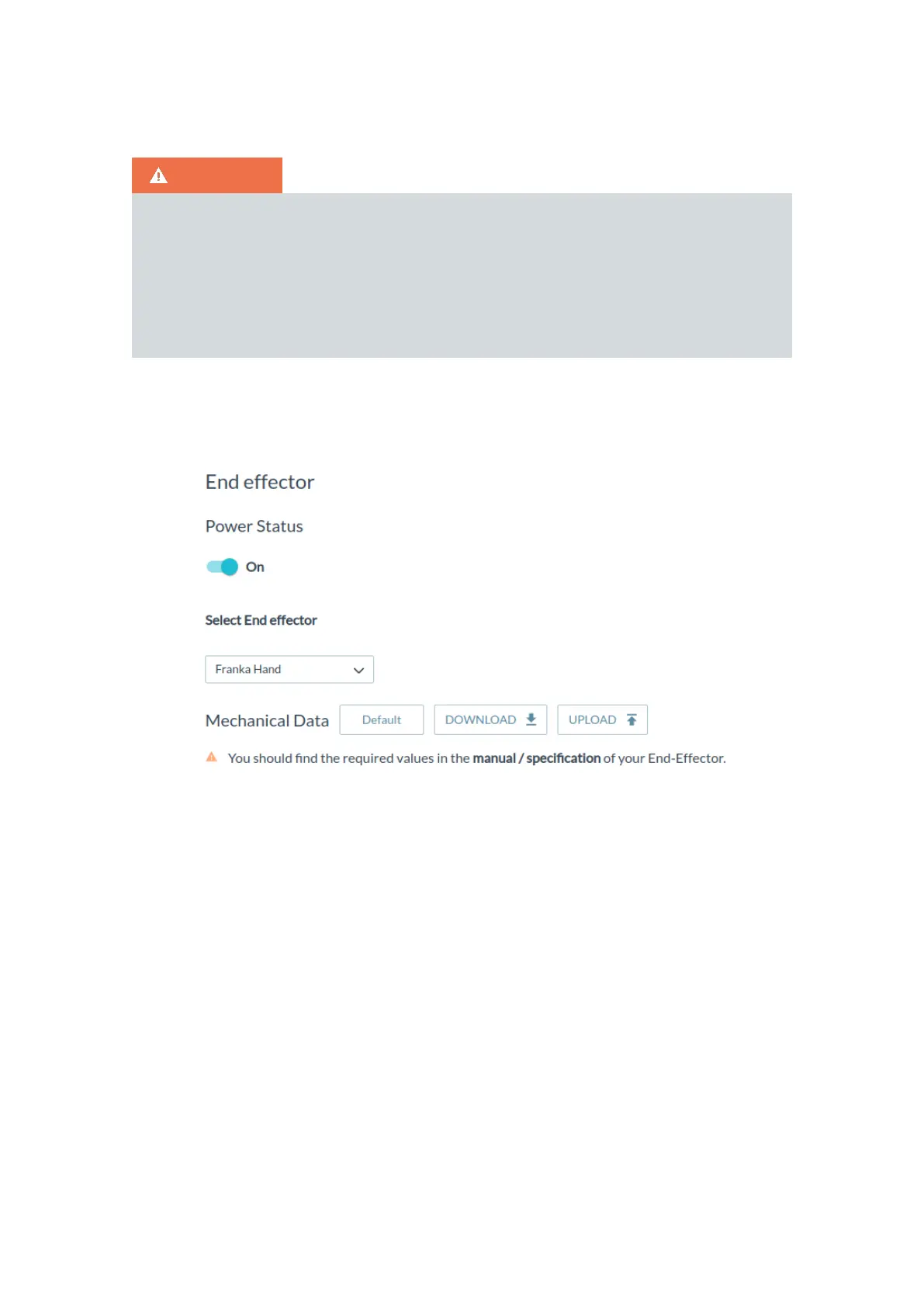
When first starting compatible Franka Emika robots – by means of the initial configuration – or at a later
point in time by accessing the end effector settings, the Hand can be selected from a dedicated dropdown
menu.
Figure 7.2
If you want to use another gripper or adjust the configuration of the Hand, select “User Defined” from the
drop-down menu and enter the corresponding values into the text fields.