April 2022 Franka Emika GmbH © 18
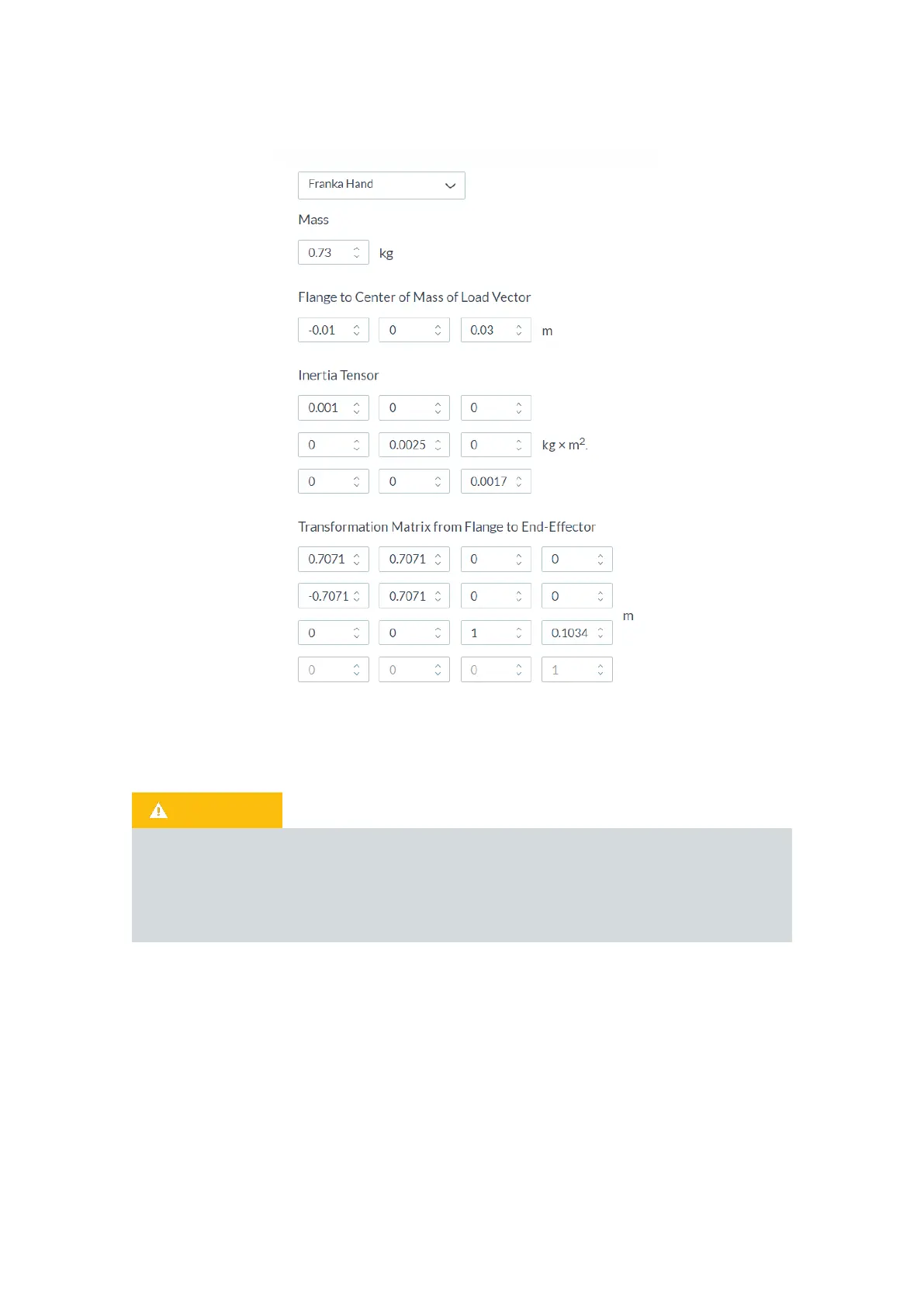
The default settings of the Hand are as follows:
Figure 7.3
A correct configuration is essential for operating compatible Franka Emika robots. When configured
incorrectly, gravitational forces are not entirely compensated and the Arm regulates to the wrong target
values.
Unexpected moving of Arm
Incorrectly set mass and center of gravity values may lead to injuries, such as crushing.
• Check the mass and center of gravity for any end effector and the objects grasped by it.
• Correct the value if necessary.
When configured incorrectly:
• The Arm may pull towards certain directions in Guiding Mode.
• The regulation in Operating Mode may be affected so that the expected sensitivity of the Arm for
collision detection is reduced.
• The tracking behavior may be affected.
For further information, refer to the Franka Production product manual.
If you are looking to attach additional tools between the Hand and flange and therefore require a longer
connection cable, see chapter ADDITIONAL INFORMATION.