April 2022 Franka Emika GmbH © 12
In the scope of delivery of the Hand there are standard fingertips which are suitable to be mounted to the
fingers of the Hand. Should you design and mount other fingers to the Hand, the following needs to be
noted:
Production standard
Carry out a risk assessment and implement the measures resulting from it.
Gripping of an object at a distance of the finger to the Hand will lead to tilting loads. The Hand is designed
and tested for a finger length of 54 mm.
Mechanical data
Weight of Hand [kg] 0.73
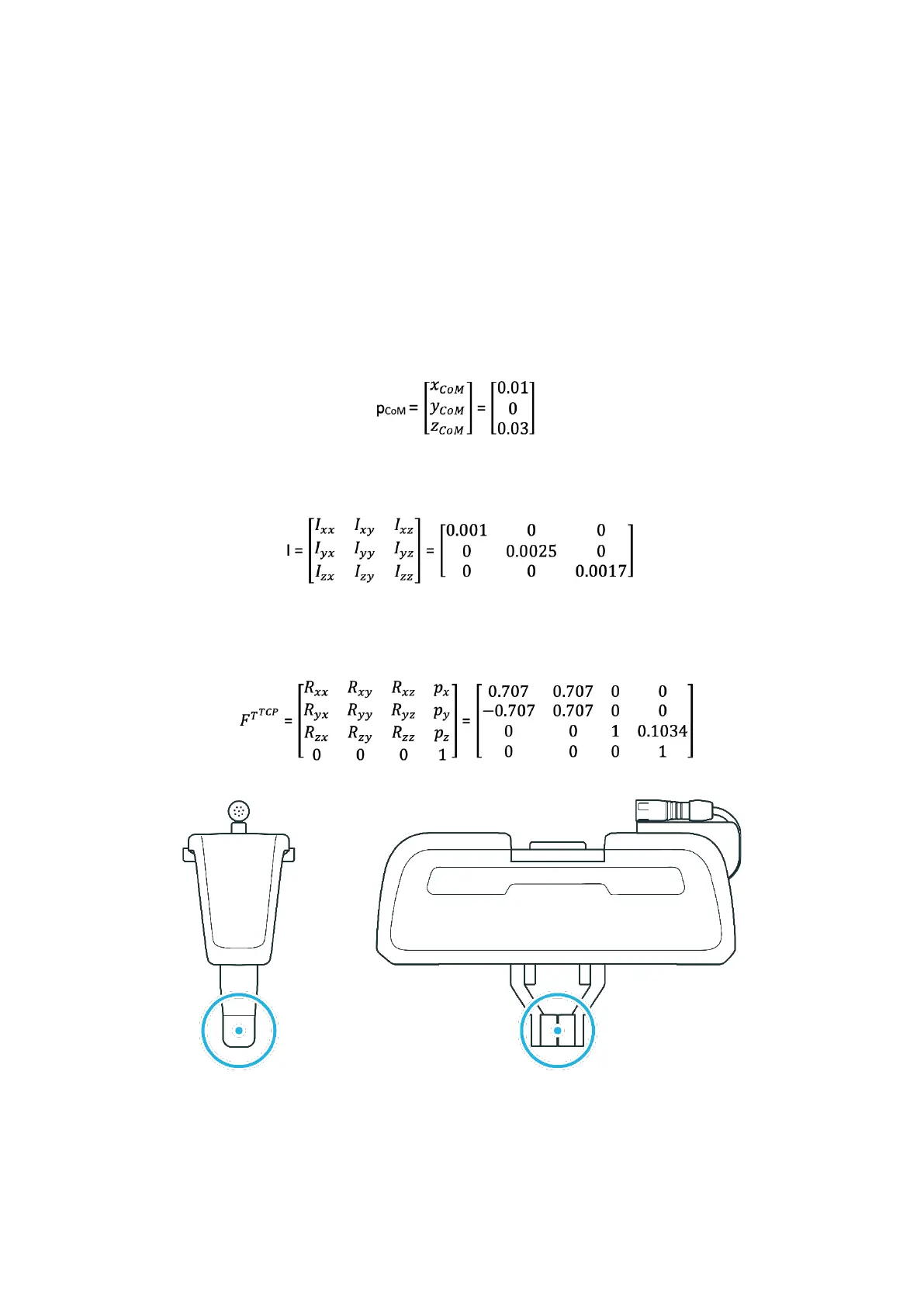
Center of mass of Hand to end effector flange [m]
Figure 5.4
Inertia tensor [kgm
2
]
Figure 5.5
Transformation matrix of end effector flange to Hand (i.e., to center point of fingertips when closed, as
illustrated in the figure below)
Figure 5.6
Figure 5.7
Grasping (continuous) force [N] adjustable: 30-70
Travel span [mm] 80
Travel speed (per finger) [mm/s] 50