Franka Emika GmbH © October 2018
108
WARNING
If the end eector is congured incorrectly, Panda will operate based on the
wrong masses and mass inera raos of the end eector. This means that
Panda will regulate to the wrong parameters and gravitaonal forces will not
be enrely compensated. This can lead to unexpected movements during
guiding, which may subsequently lead to injuries caused by the movement
itself or by the user inching.
Therefore:
• Always check the conguraon of the end eector
• When copying an already parametrized app or task to another Panda
system, also make sure that the end eector conguraon sll is iden-
cal to the original one
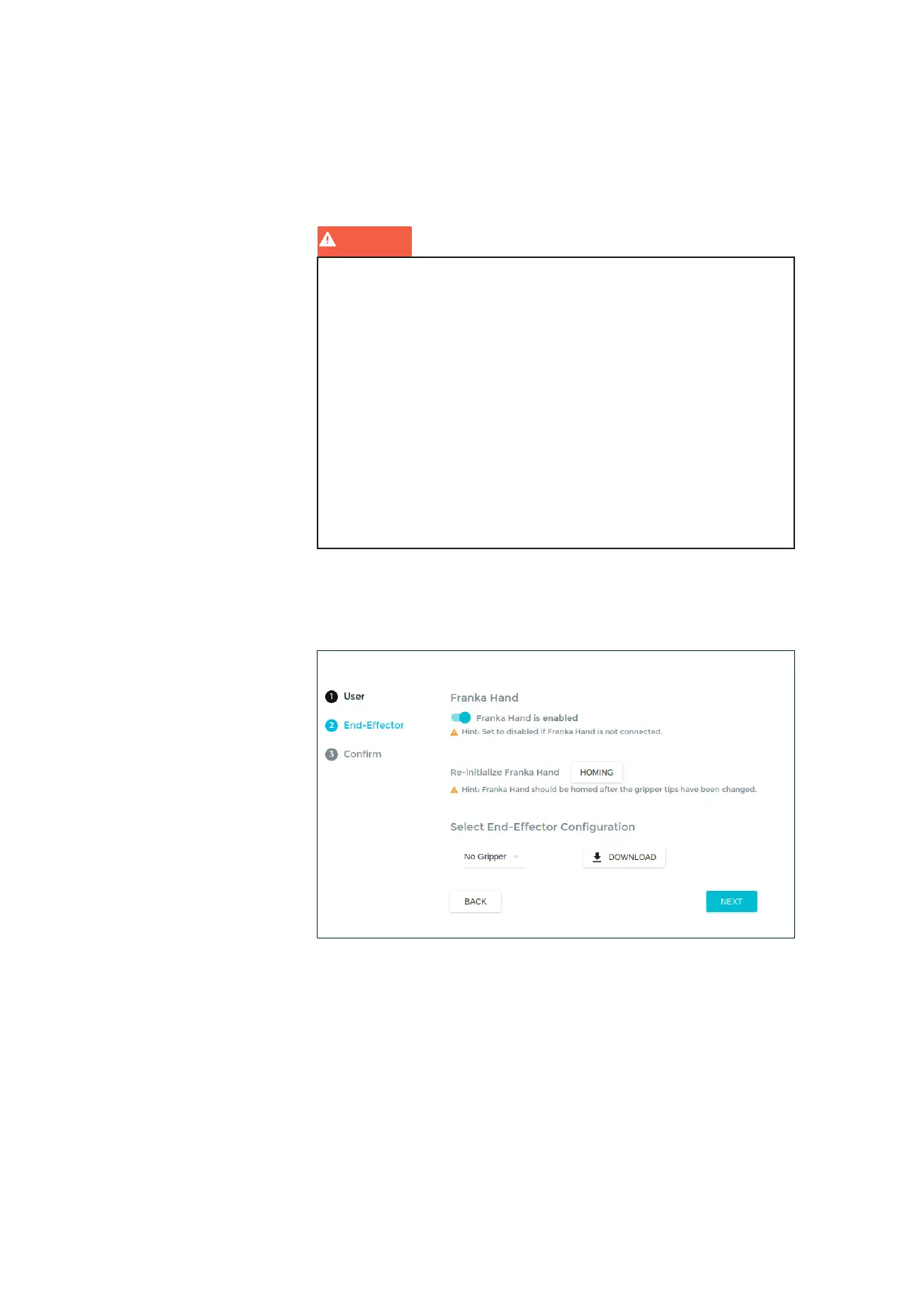
If you do not have a gripper, select „No Gripper“ from the drop-down. Keep the
following DEFAULT setting:
End effector configuration
If you have mounted the Hand, select „Hand“ from the drop-down.
If you want to use another gripper or adjust the conguraon of the Franka Hand,
select “User Dened” from the dropdown and enter the corresponding values into
the text elds. The appropriate values are usually found in your gripper’s manual.
The default sengs of the Hand are as follows: