Franka Emika GmbH © October 2018
46
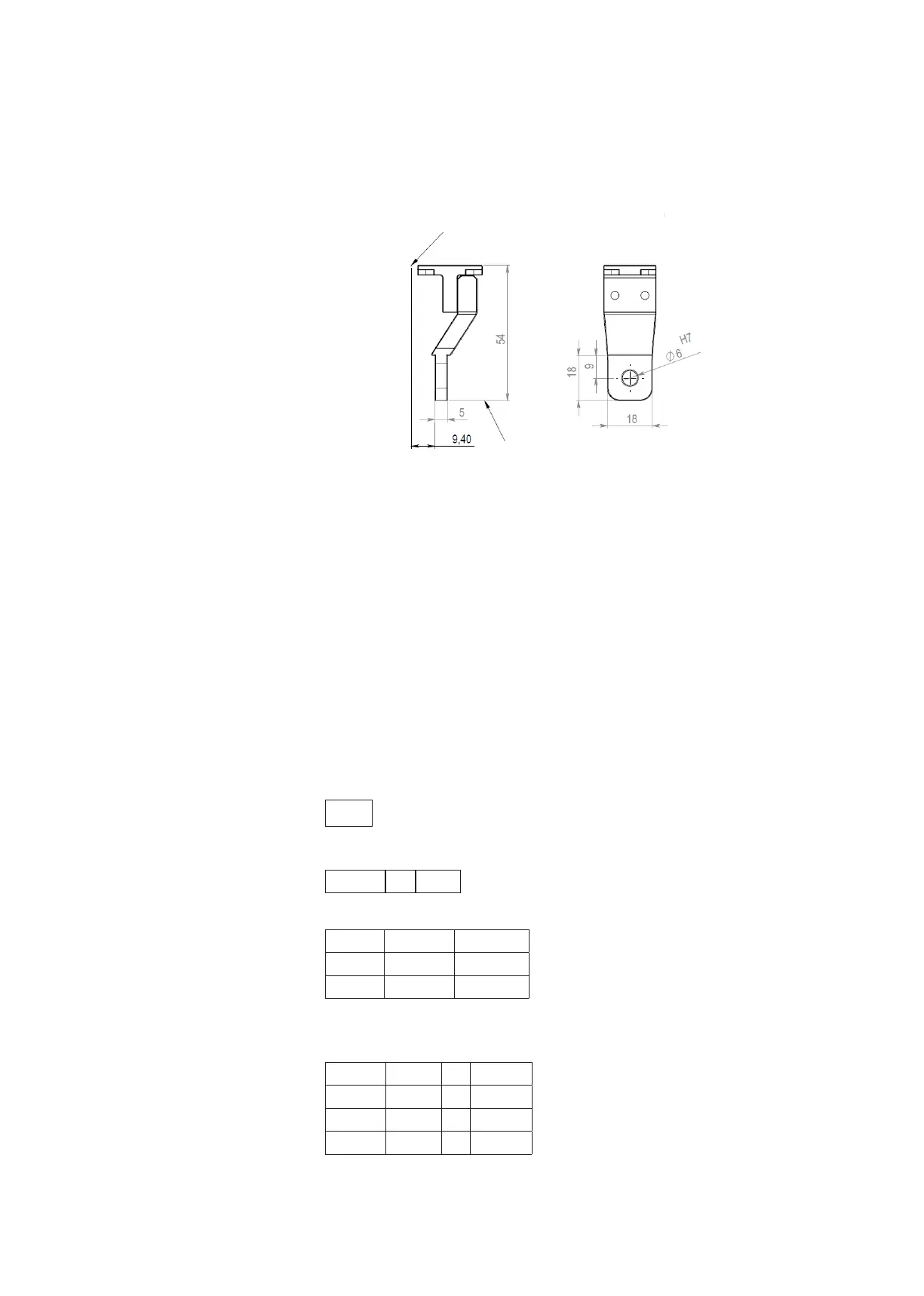
Interface nger to ngerps
Mechanical data of Hand
Max. gripping force point
• These fingers are included in the scope of delivery of the Hand and are
suitable for being mounted to the Hand
• Should you design and mount other fingers to the Hand, the following
needs to be noted:
• Carry out a risk assessment and implement the measures resulting from it
• Gripping of an object at a distance of the finger to the Hand will lead
to tilting loads. The Hand is designed and tested for a finger length of
54mm.
The following 4 data sets are to be set in Desk, as soon as the Hand has been
aached to the Arm.
e.g. at the Arm’s start up: for more informaon, see chapter: Start-up
Weight of hand [kg]
0.73
center of mass of Hand to end eector ange [m]
-0.01 0 0.03
Inera sensor [kg x m2]
0.001 0 0
0 0.0025 0
0 0 0.0017
Transformaon matrix of end eector ange to Hand (center point of nger ps
when closed)
0.707 0.707 0 0
-0.707 0.707 0 0
0 0 1 0.1034
0 0 0 1
SPECIFICATION