Franka Emika GmbH © October 2018
68
There are three ways of bringing Panda into a stopped condition:
• If constructional measures have been implemented to prevent persons from
entering Panda’s Saftey Area the external activation device (connected to X3
at the base) is used for activating and deactivating Panda. Deactivation means
here that the Arm is decelerated and brought to a full stop in the condition of
“monitored stop” (stop category 2 according to IEC 60204-1). Then Panda will
glow white and the Safety Area can be entered.
• If Panda is to be brought into “monitored stop” upon deactivation of a safe-
guard (e.g. opening of a safety fence), this safeguard is to be connected to the
female connector X3 instead of the external activation device (stop category
2 according to IEC 60204-1).
• If Panda is to be stopped as quickly as possible, with the power to the axes
being cut off and the locking bolts locking the Arm mechanically, the safegu-
ard can be integrated between Panda’s Control and the mains power supply.
This will ensure that a deactivation of the safeguard (e.g. opening of a safety
fence) will cut off the power supply to the Control (stop category 0 according
to IEC 60204-1).
Stopping mechanisms
The emergency stop is designed for emergencies and should not be used as
the habitual on/o switch for the machine. The emergency stop device must
be acvated at start-up and checked for funcon at least every 12 months.
In order to avoid damage being caused to Panda, the emergency stop system
must always be tested while at standsll. It should be noted, that when dis-
connecng from the power supply the safety bolts will catch in all 7 joints and
the robot will sink a lile due to gravitaonal force.
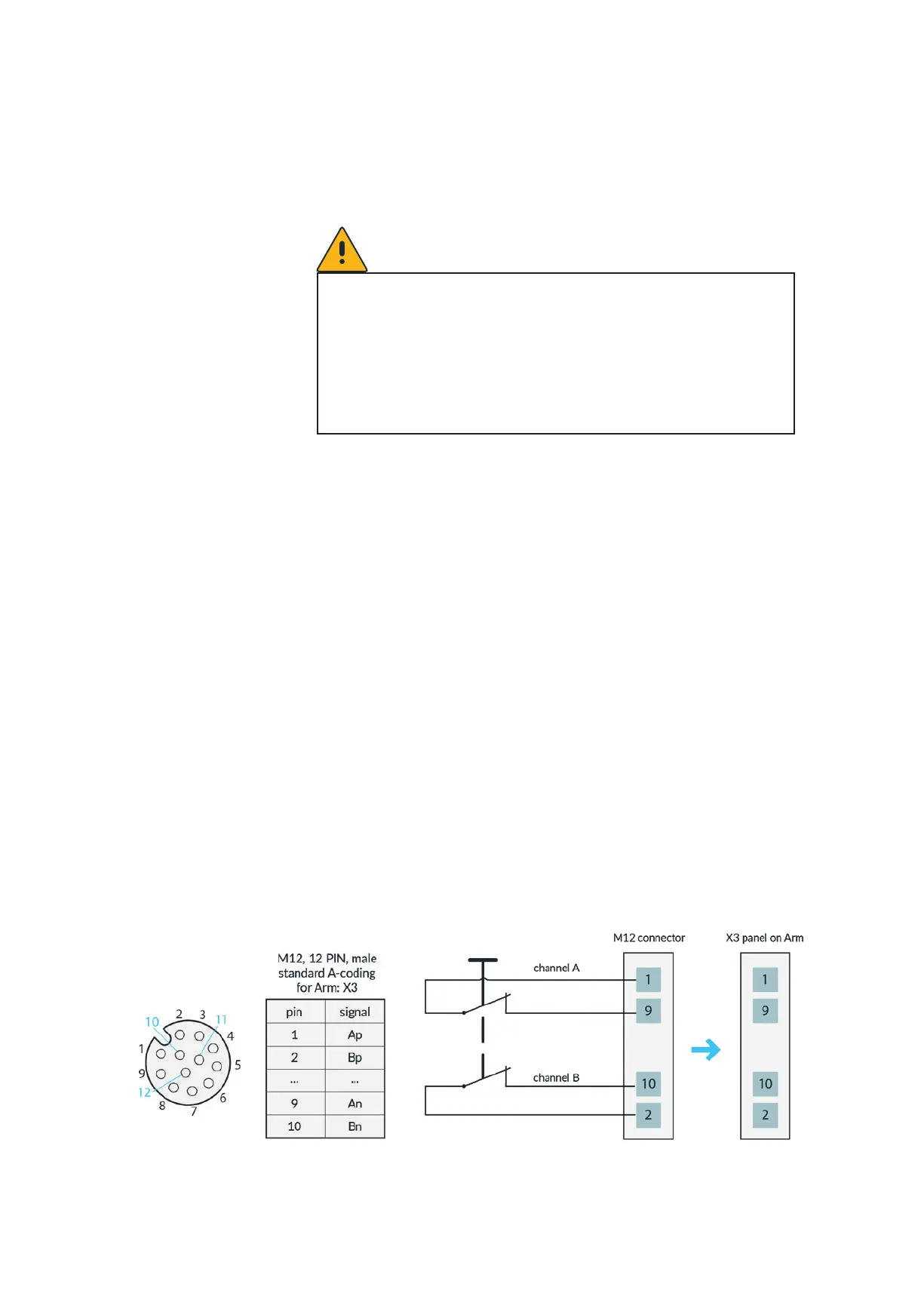
Wiring example for X3 Pinning of the X3 socket using wiring example:
SAFETY CONCEPT