Robot welding
Prerequisite A robot interface or field bus system is needed in order to be able to control the power
source from a robot control unit.
General 2-step mode is selected automatically if a ROB 4000 / 5000 robot interface or field bus
system is connected. The mode can only be changed using the Mode button when the
robot interface or field bus has been disconnected from the LocalNet.
If a ROB 3000 robot interface is connected, any mode (2‑step mode, 4-step mode, spe-
cial 4-step mode, etc.) can be selected.
More information about robot welding can be found in the operating instructions for the
robot interface or field bus systems and in the "Robot‑interface" leaflet (42,0410,0616).
Special 2-step
mode for robot
interface
The special 2-step mode function is available if a robot interface or field bus system is
connected to the LocalNet.
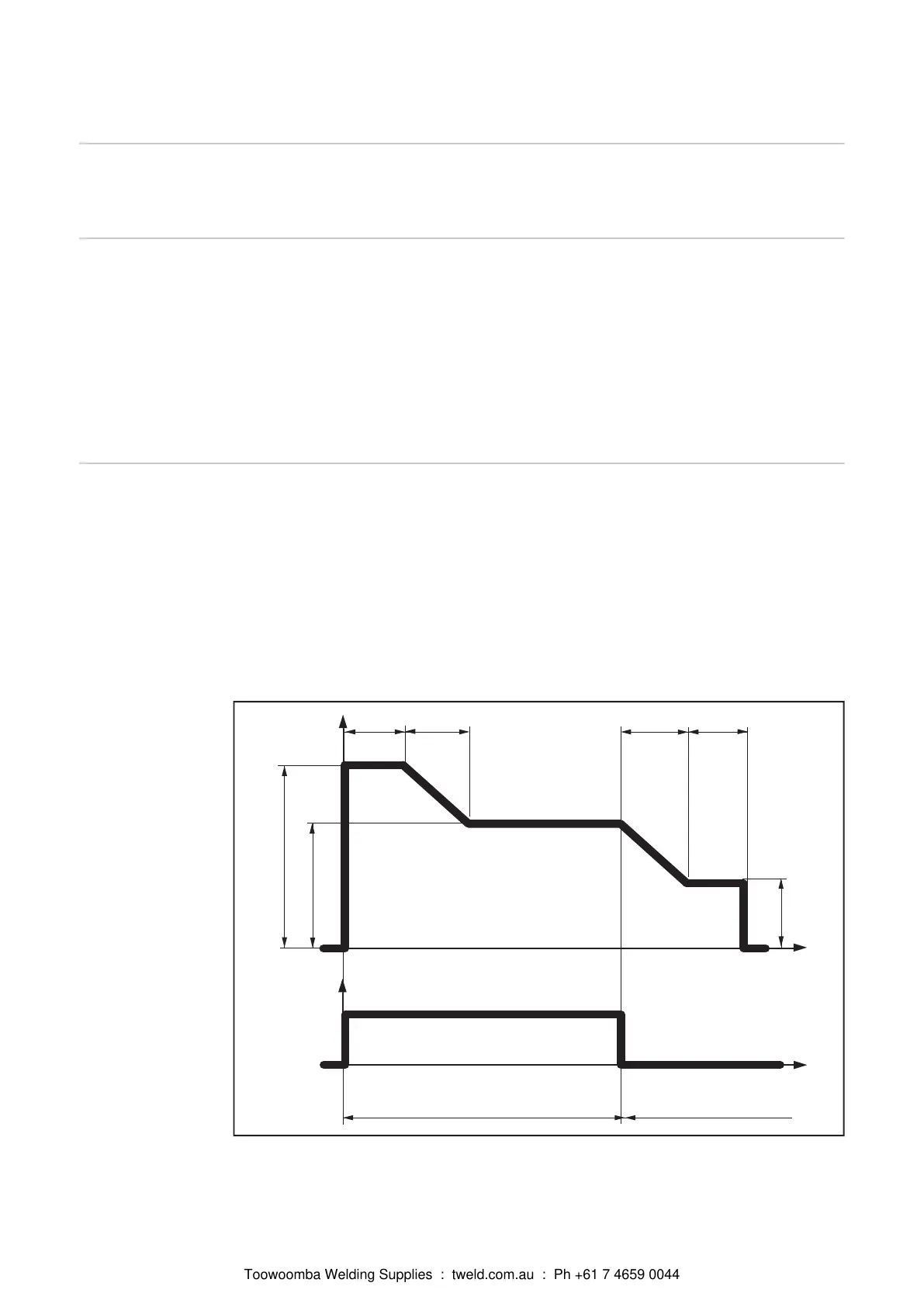
Function of special 2-step mode for robot interface
I-S = Starting current
phase
SL = Slope I-E = End-crater phase
t‑S = Starting current dura-
tion
t‑E = Final current duration Signal = Robot signal
ON = Welding start OFF = Welding stop
Signal
0
1
I
I-S
I-E
E-tLSLSS-t
I
t
t
OFFON
Function of special 2-step mode
114
Toowoomba Welding Supplies : tweld.com.au : Ph +61 7 4659 0044
 Loading...
Loading...