第 10 页 共 16 页
Parameter
High byte
Parameter
Low byte
Default Rang Comment
4 0
0—31
Torque boost up at low speed :
0:no action
1~31:31 levels Torque boost up
5 1
0/1
Stop pin mode:
0:Constant speed tackle mode (in the belt
transmission, Parking is not precision)
1:back pull mode(PMX)
6 150 0 ~800 Command button to fill half-needle time
7 180 0 ~800 Command button to fill a needle time
1 0
0/1/2
Translating Parameter
0:no action
1:Download parameters( the panel will
parameter from panel to controller )
2:Upload parameters ( the panel will parameter
from controller to panel)
2 0 1, 2, XXXX
Restore storage parameter(Only restore
parameters to operators, and vendors and
maintenance )
Belt flat 1000/ Direct drive flat 2000
3 0 1, 2
Backup current parameter as user parameter for
restore (restore)
Operation
6
Note: Above such “6x "parameter to operate is not saved.
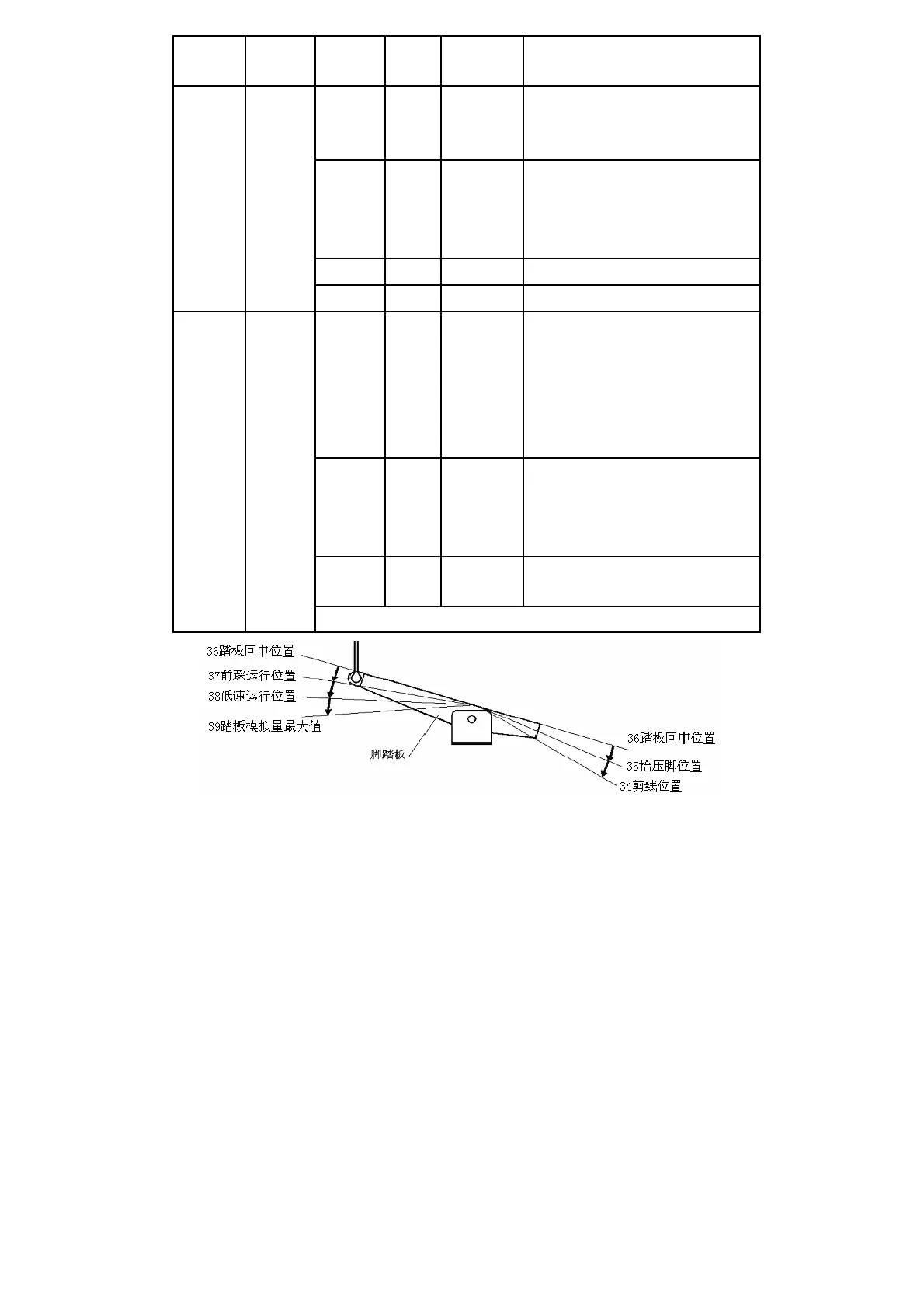
Fig2-1 Pedal action parameter the position of the diagram