13 / 24
S1032_mz-8P_V1.1sh
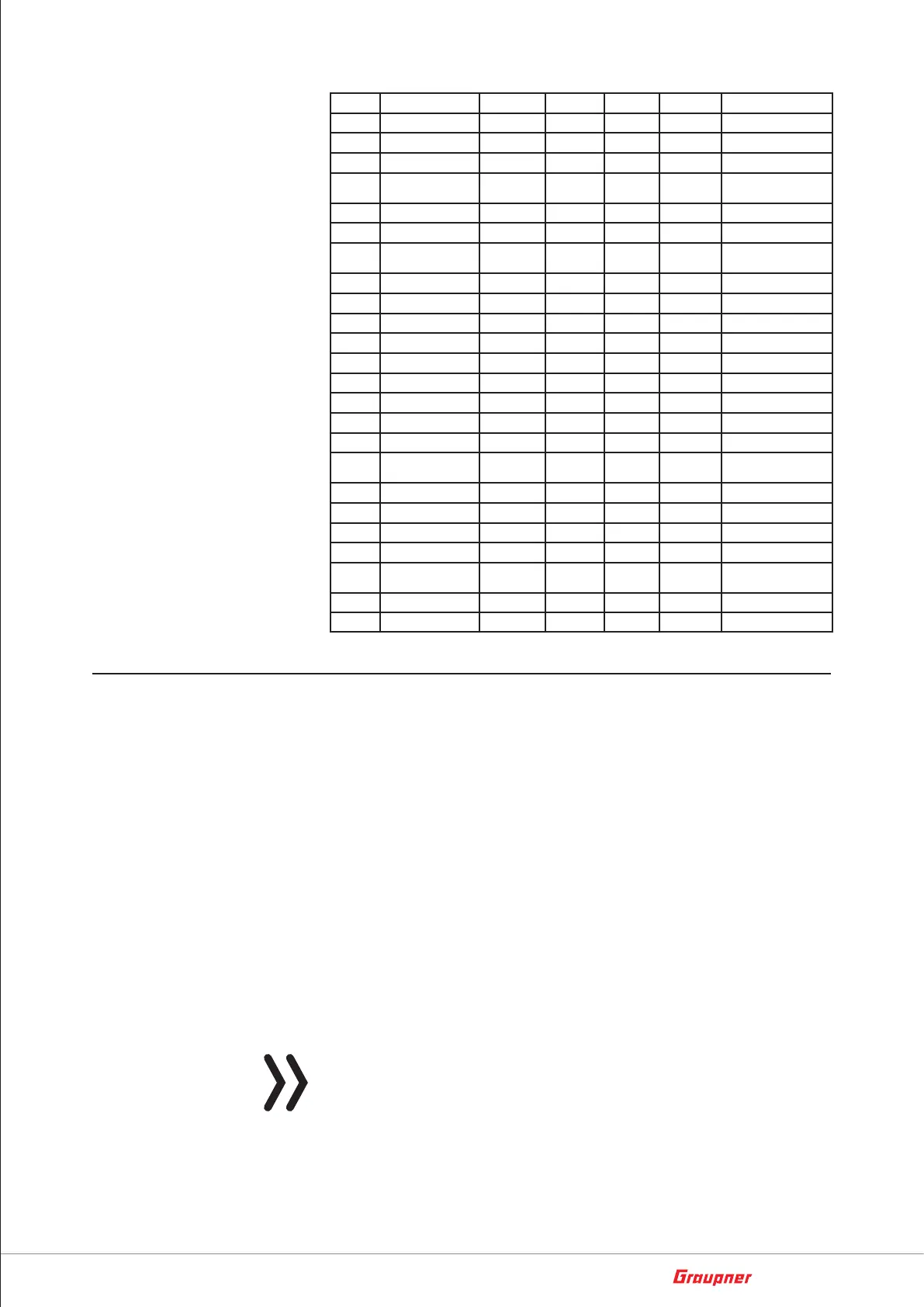
Rx volt / temp Blinks quickly 2x high / 2sec
Out of range Blinks slowly 1x high / 2sec
System error 1x low / 2sec
Normal
mode
Trim inc/dec 1x low / click
Trim 0% 1x high / click
Program
mode
Program mode start Blinks 1x 1x low
Program mode end 1x low
Servo reverse (normal) Blinks 1x 5x 1x low
Servo reverse (reverse) Blinks 2x 5x 2x low
ATV 100% 1x high
Fail Safe mode start Blinks 2x 2x low
Fail Safe „HOLD“ Blinks 1x 5x 1x low
Fail Safe „POS“ Blinks 2x 5x 1x high
Stick cali-
bration
Calibration mode start Blinks 1x 3x
Calibration ended Blinks 3x 3x Blinks 3x 3x 2x low
„Deadband“ setting Blinks / 3sec
Flip mode 360° FLIP active 10x high / 2 sec
Motor
OFF
Motor cut OFF Blinks
quickly
3x low
Camera Snapshot ON/OFF
Video record Blinks slowly ON: 1x low / OFF: 2x high
binding
If no copter is still bound to the transmitter or if another copter is to
be bound to the transmitter, proceed as follows:
Binding step-by-step
1. Switch on transmitter.
The red status LED of the transmitter flashes once per second.
2. Start the copter by plugging in the drive battery or switching on
the power supply.
3. Possibly put the copter in bind mode according to its instructions.
4. Press the LED button on the bottom left of the transmitter.
If the binding process was successful, the red status LED of the
transmitter lights up constantly. Otherwise the process has to be
repeated.
Notes
• After a binding process, the highest control sensitivity is always
preset by default. If you press the "SPEED" button, you can
reduce it to "medium" (2-way sound) or "low" (1-way sound).

 Loading...
Loading...








