DA98A AC Servo Drive Unit
User Manual
35
15 Encoder counting error Encoder counting is abnormal.
16 Motor heat overloading
The electrothermal value of the motor exceeds
the setting value (I
2
t detection).
19 Thermal reset The system is thermally reset.
20 IC4(EEPROM) error
IC4 (EEPROM) is at fault.
21 IC3(PWM chip) error
IC3 (PWM chip) is at fault.
22 IC2(CODER chip) error
IC2 (CODER chip) is at fault.
23 IC7(A/D chip) error
IC7 (A/D chip) or current sensor is at fault.
30 Encoder Z pulse lost Encoder Z pulse is at fault.
31 Encoder UVW signal error
Encoder U, V, W signal is at fault or not suited
with encoder.
32
Encoder UVW signal illegal
encoding
U,V,W signals are all high level or all low level.
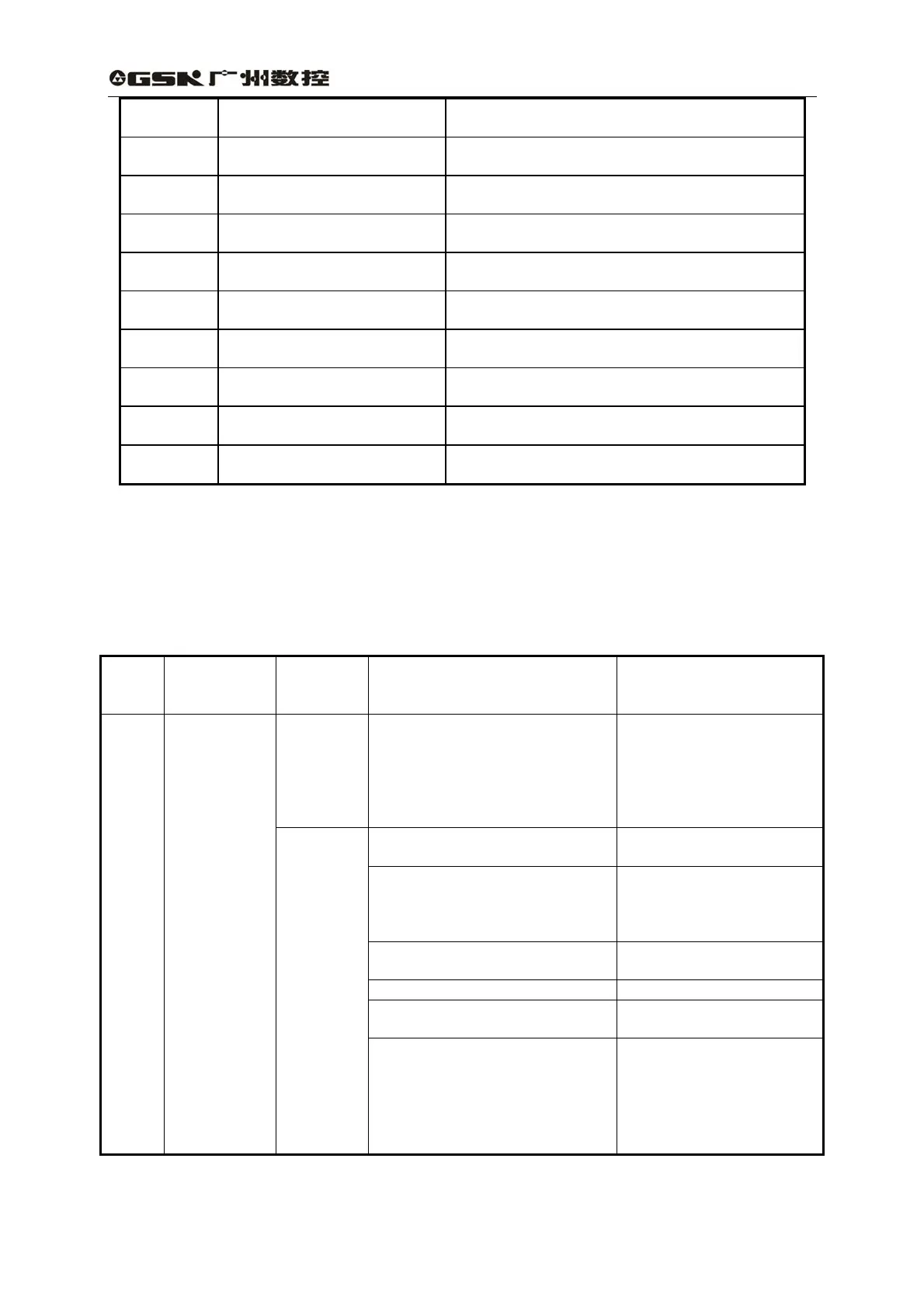
5.2 Alarm troubleshootings
Table 5.2 Alarm troubleshootings
Alarm
code
Alarm name Status Cause Troubleshootings
Occuring
as control
power
supply is
powered
on
① Control circuit board fault
② Encoder fault
① Change the AC servo
drive unit.
② Change the servo
motor.
The pulse frequency of input
instruction is too high.
Correctly set the input
instruction pulse.
Acceleration/deceleration time
constant is too small to make
the speed overshooting too
large.
Increase acceleration
deceleration time constant.
The input electronic gear ratio is
too large.
Set it correctly.
Encoder fault Change the servo motor.
Encoder cable is inferior.
Change the encoder
cable.
1 Overspeed
Occuring
as motor
is running
Servo system is not stable that
causes overshooting.
① Set the related gain
again.
② If the gain can not be
set to a proper value,
reduce the moment
inertia ratio of load.