Operation
39
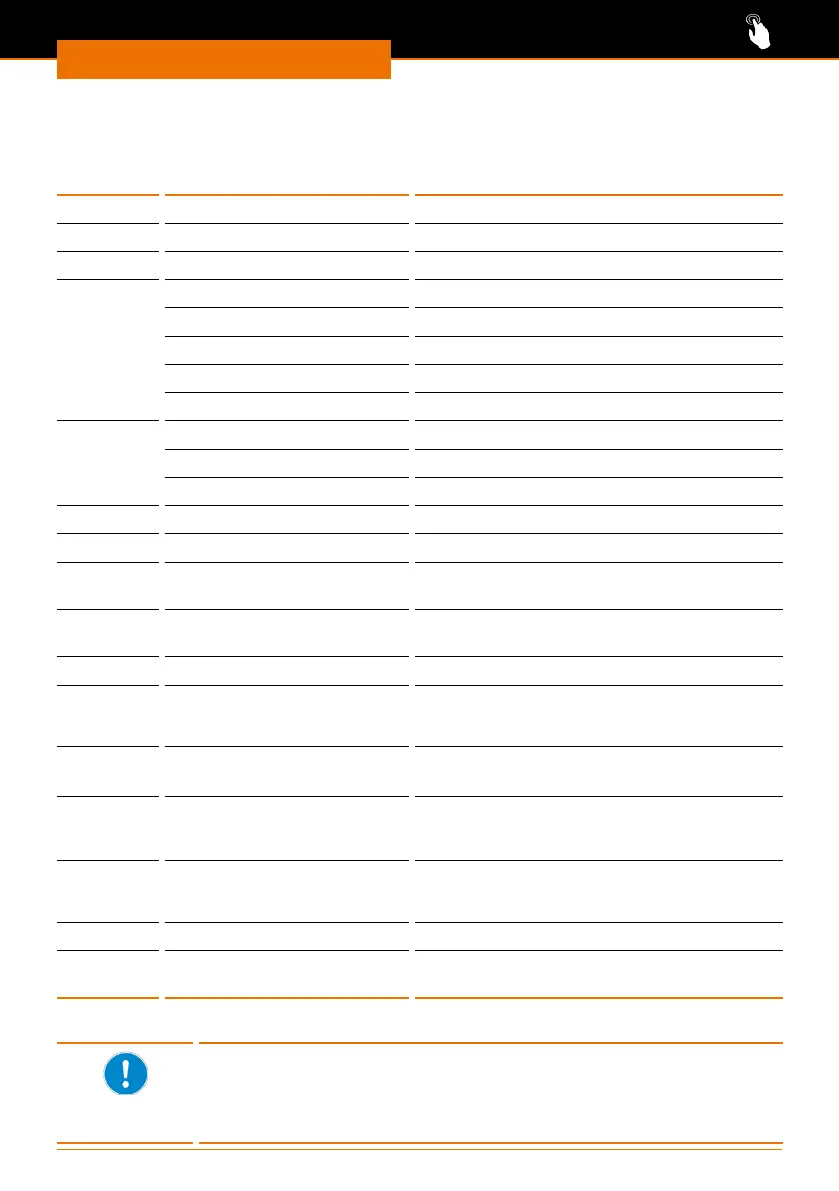
Interface commands
Command
to stirrer*
Feedback from stirrer Feature
r\r\n RPM: xxxx\r\n Display actual speed (rpm)
s\r\n SET: xxxx\r\n Display set speed (rpm)
m\r\n NCM: xxxx\r\n Display torque (Nmm)
f\r\n FLT: No Error!\r\n No error detected
FLT: Motor Error!\r\n Motor error
FLT: Motor Temperature!\r\n Motor overheated, restart rotation
FLT: Stopped Manually!\r\n Stirrer stopped manually
FLT: Overload!\r\n Motor overloaded
T\r\n HT:100P\r\n Connected to Hei-TORQUE 100 Precision
HT:200P\r\n Connected to Hei-TORQUE 200 Precision
HT:400P\r\n Connected to Hei-TORQUE 400 Precision
Rxxxx\r\n Rxxxx\r\nSET:xxxx\r\n Start rotation at set speed xxxx (rpm)
R0000\r\n R0000\r\nSet\:0\r\n Stop stirrer, set speed saved
A\r\n A direction\r\n
B direction\r\n
Switch to gear II
B\r\n A direction\r\n
B direction\r\n
Switch to gear I
C\r\n Clear Error\r\n Delete “Overload” error message
D\r\n Direct control\r\n Deactivate communication link:
✓ Remote is control deactivated
✓ Device can be operated manually
N\r\n Null reference\r\n Set actual torque to zero:
✓ Torque is being calibrated
F\r\n F\r\n Check communication link
(Stirrer will shut down o after 60 seconds
if no commands are received)
M\r\n M\r\n Identify device:
✓ Display on the linked stirrer will start
ashing
t\r\n TMP: xxx\r\n Display temperature
z\r\n zSET: xxxx\r\nzACT:
hhmmss\r\n
Timer: display set time and remaining time
*Interface parameter RS232: 9600 Baud, No Parity, 8 Bit, 1 Stopbit
▪ Do not send commands as package,
minimum pause 0.1 seconds
▪ Commands M, F, T and z are not valid for stirrer RZR
▪ xxxx stands for a 1 - 4 digit gure
▪ Receiving \r\n may be displayed in a row

 Loading...
Loading...