4. Servo using method and gain adjustment
4-4
)
ST
1
(1K
I_SC
P_SC
∗
+×
Command
speed
-
Feedback speed
+
GainLoopSCK
P_SC
=
TCSCT
I_SC
=
4) This sets the inertia ratio.
P02-19
Inertia Ratio
Unit
-
Display range
1.0~ 50.0
Manufactured
default
2.0
Speed/Torque/
Position control
inertiaMotor
inertia) Load inertia(Motor inertia System
inertia Load
=
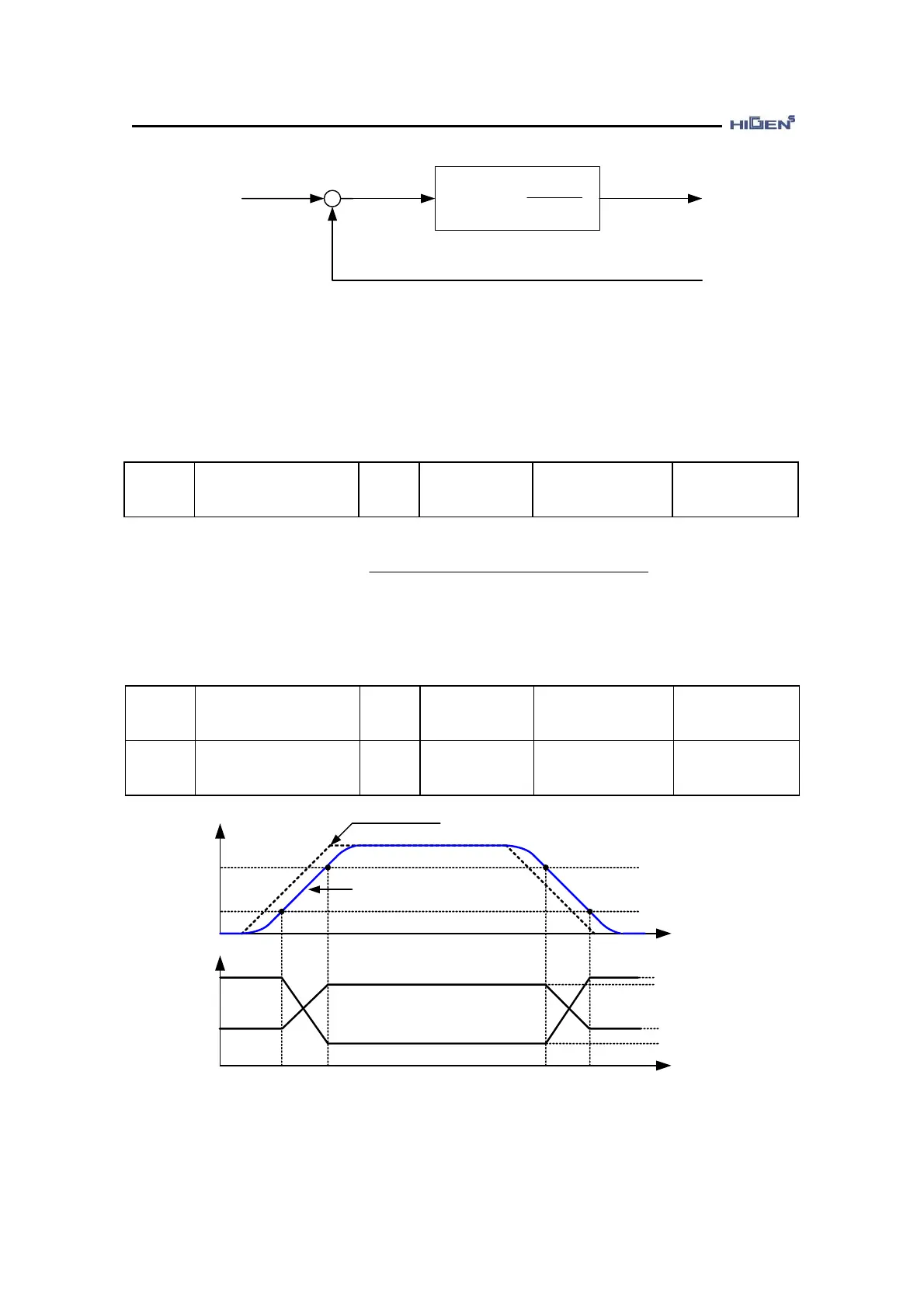
5) When P03-01=”3”, the variable gain is applied based on the following gain adjustment speed
1 and 2.
P02-20
Gain ADJ Speed1
Unit
rpm
Display range
100.0 ~ 5000.0
Manufactured
default
800.0
Speed/Torque/
Position control
P02-21
Gain ADJ Speed2
Unit
rpm
Display range
10.0 ~ 500.0
Manufactured
default
100.0
Speed/Torque/
Position control
Speed
P02-20
P02-21
Gain
P03-05
P03-07
Command speed
Actual speed
P03-06
P03-08
SC TC
SC loop gain
6) When P03-01=”4”, the variable gain is applied based on the following gain adjustment torque
1 and 2.