3. Parameter setting
3-37
Position/torque multi control mode internal setting function table
(When P7-01 is set to 30 (Position/torque multi control mode))
Servo on/off operation input contact point
Temporary stop input contact point
Emergency stop input contact point
Alarm reset input contact point
electronic gear ratio conversion input contact point 1
electronic gear ratio conversion input contact point 2
Torque limit use input contact point(Position control)
/Speed limit use input contact point (Torque control)
When the control mode is set to multi mode,
control mode conversion input contact point
Position command pulse clear input contact point
Digital torque input contact point1
CCW revolution limit input contact point
(Position control)/ CCW torque generation limit
input contact point (Torque control)
CW revolution limit input contact point
(Position control)/ CW torque generation limit
input contact point(Torque control)
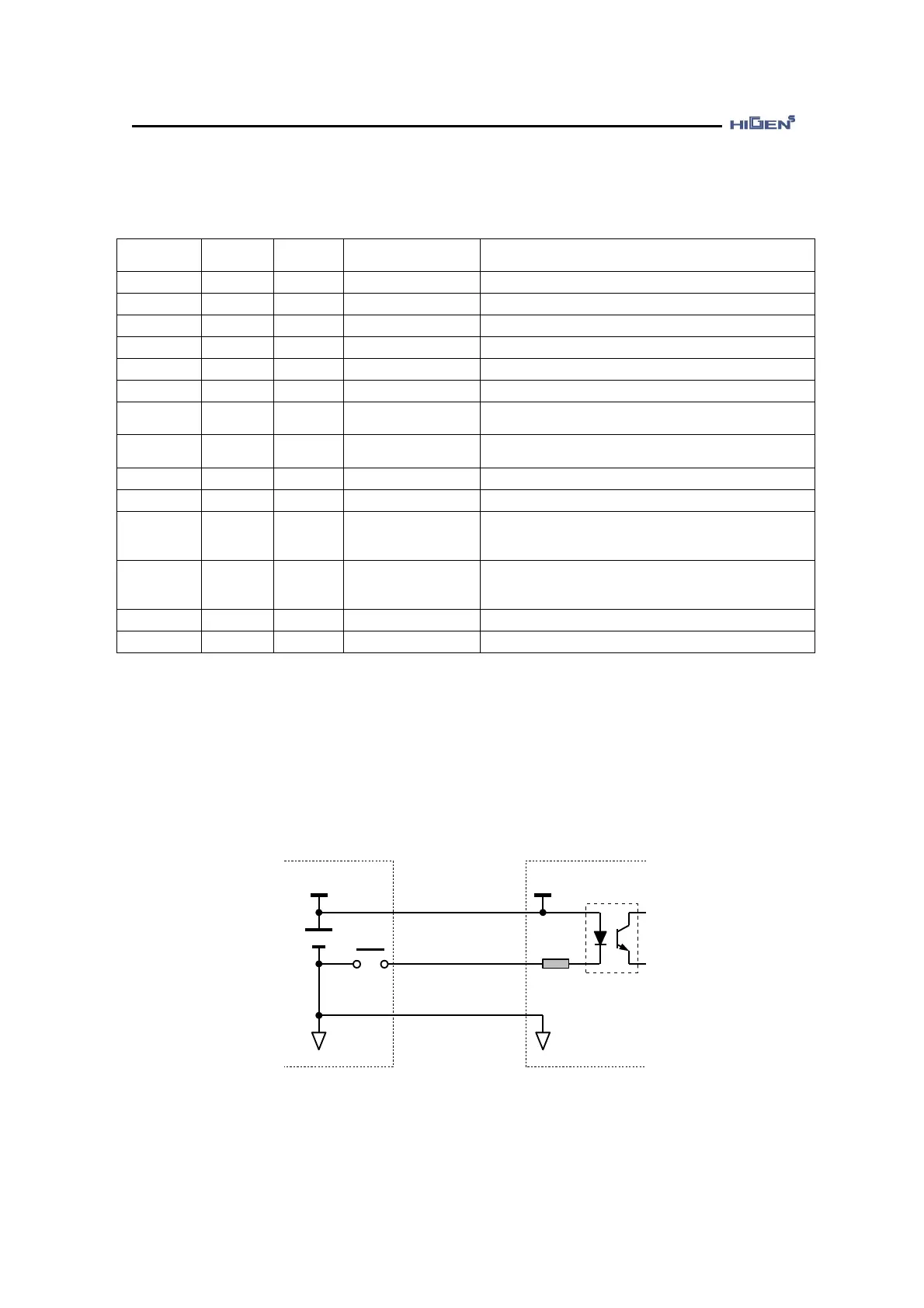
[Wiring method of input contact]
In case of using contact input such as relay or switch, connect with servo drive as follows.
At this time, use an external power supply of +24 [V], 50 [mA] or higher.
+24V
(CN1_49)
(CN1_24, 25)
(CN1_18,43,17,42,16,
41,15,40,14,39,13,38)
FDA7000Controller
24VGND
3.3
+24V
24VGND