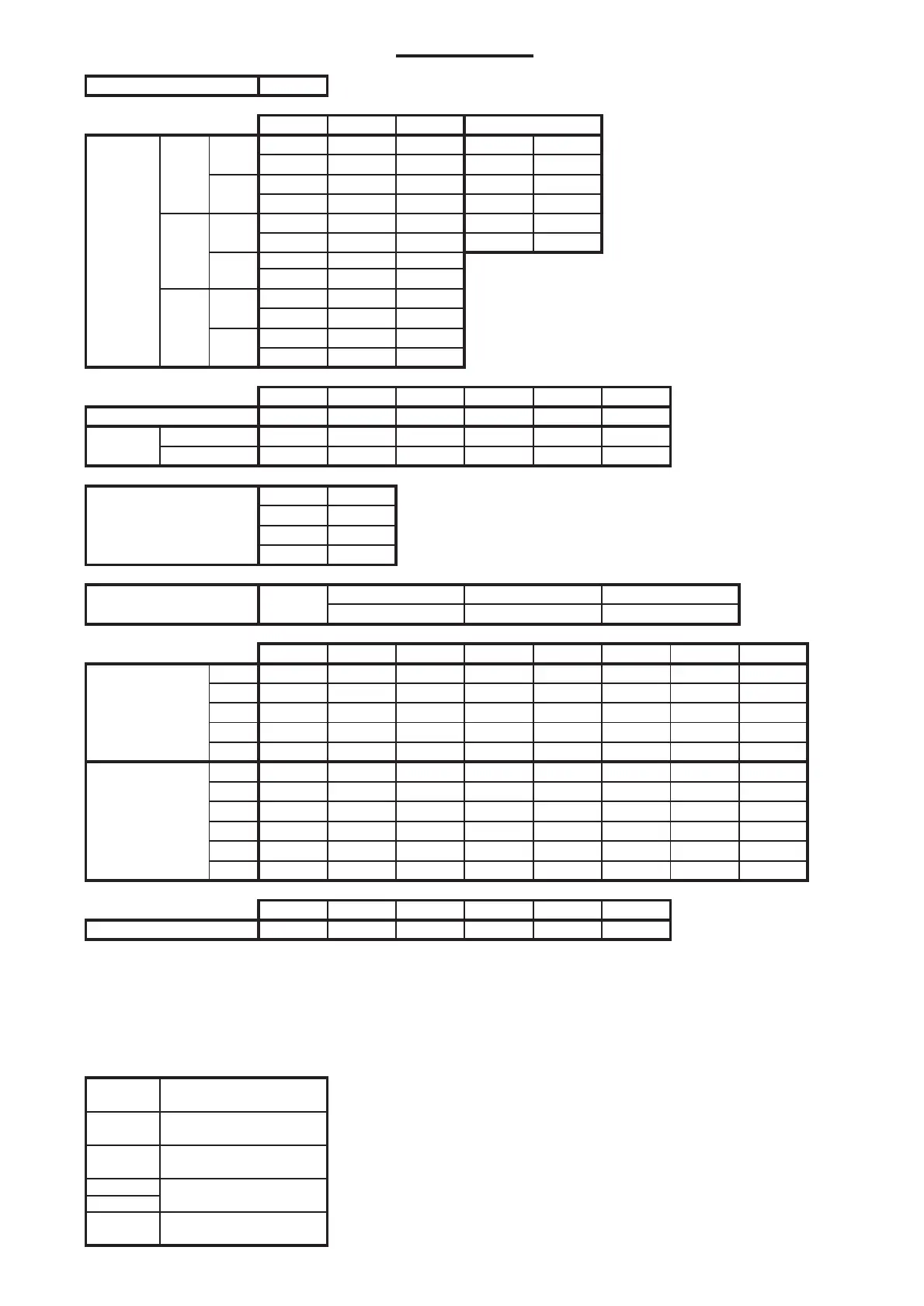
72
NORM
ホバリング
Hovering
ループ系
Loop
ロール系
Roll
オートローテーション
Autorotation
3D
ST-1
ST-2
ST-3
ST-4
NORM
EXP
ACT
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
0%
AILE
-50%
ELEV
50%
PIT.
-50%
EXP
INH
0%
30% 43% 50% INH
100%
100% 100% 140% 100% 100%
100%
100% 100% 140% 100% 100%
THR
CH2 CH3 RUD GER CH6
NORM
REV. REV. NORM NORM NORM
INH 70%
85% INH INH 82% INH
INH INH
HOLD Pos.
STICK AUTO Delay
INH 100%
100% INH INH 90% INH INH 100%
100% INH INH 85% INH INH 100%
100% INH INH 85% INH INH 100%
38% 56% INH 68% INH INH 82%
32% INH INH 57% INH INH 82%
26% INH INH 50% INH INH 80%
15% INH INH 50% INH INH 82%
15% INH INH 50% INH INH 82%
20% INH INH 60% INH INH 100%
L12345H
ST-1
ST-2
ST-3
ST-4
NORM
ST-1
ST-2
ST-3
ST-4
HOLD
HOLD
HOLD
CH6
HOLD
GER
HOLD
RUD
HOLD
CH3
HOLD
CH2
Pos.-172
THR
Fail Safe
PIT. CURV
THRO CURV
THRO Hold
Swash Mix
REV. SW
(H/L/D)
(L/R/U)
TRVL
ADJ.
80% 80% 90% NORM
AILE ELEV RUDD AUTO
Pos0
Pos-0
SWASH TYP 3s120°
D/R
EXP
D/R
EXP
D/R
EXP
Pos-1
D/R &
EXP
Pos-2
80% 80% 90% ST-1 Pos1
LIN LIN LIN ST-2 Pos1
LIN LIN LIN ST-3 Pos2
100% 90% 100% ST-4 Pos2
100% 90% 100% HOLD Pos0
LIN LIN 50%
LIN LIN 50%
100% 100% 100%
100% 100% 100%
LIN LIN 50%
LIN LIN 50%
JR PCM9X
※1. ジャイロはG410Tを使用しています。
G410T is applied to Gyro.
※2. A.D.T.は実際の飛行に合わせて調整して下さい。
Adjust the A.D.T. by actual flight.
※3. 各コンディションは以下のような設定になっています。
The setting of each condition is following.