15
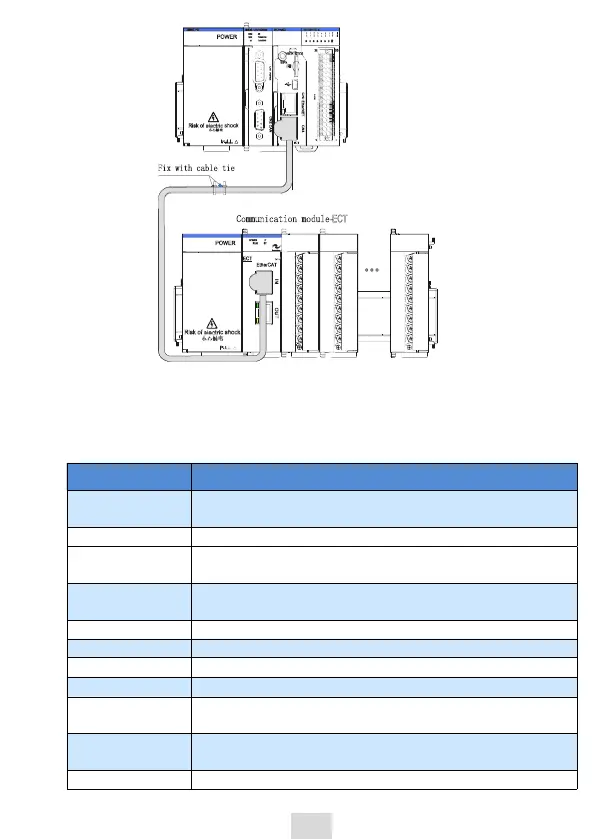
Figure 5 Fix the cable end that near the device
5.2 EtherCAT bus connection
Item
Communication
protocol
EtherCAT protocol
Service supported CoE (PDO, SDO)
Max. synchronous
jitter
120 us (typical)
Synchronization
mode
The servo adopts a DC-distributed clock and input and output
synchronization
Physical layer 100BASE-TX
Baud rate 100 Mbit/s (100Base-TX)
Duplex mode Full duplex
Topology Linear
Transmission
medium
Network cables, see the Wring section
Transmission
distance
Less than 100 m between two nodes
Number of slaves Up to 16 DSP402 slaves
 Loading...
Loading...




