Chapter4FunctionCodeTable
23
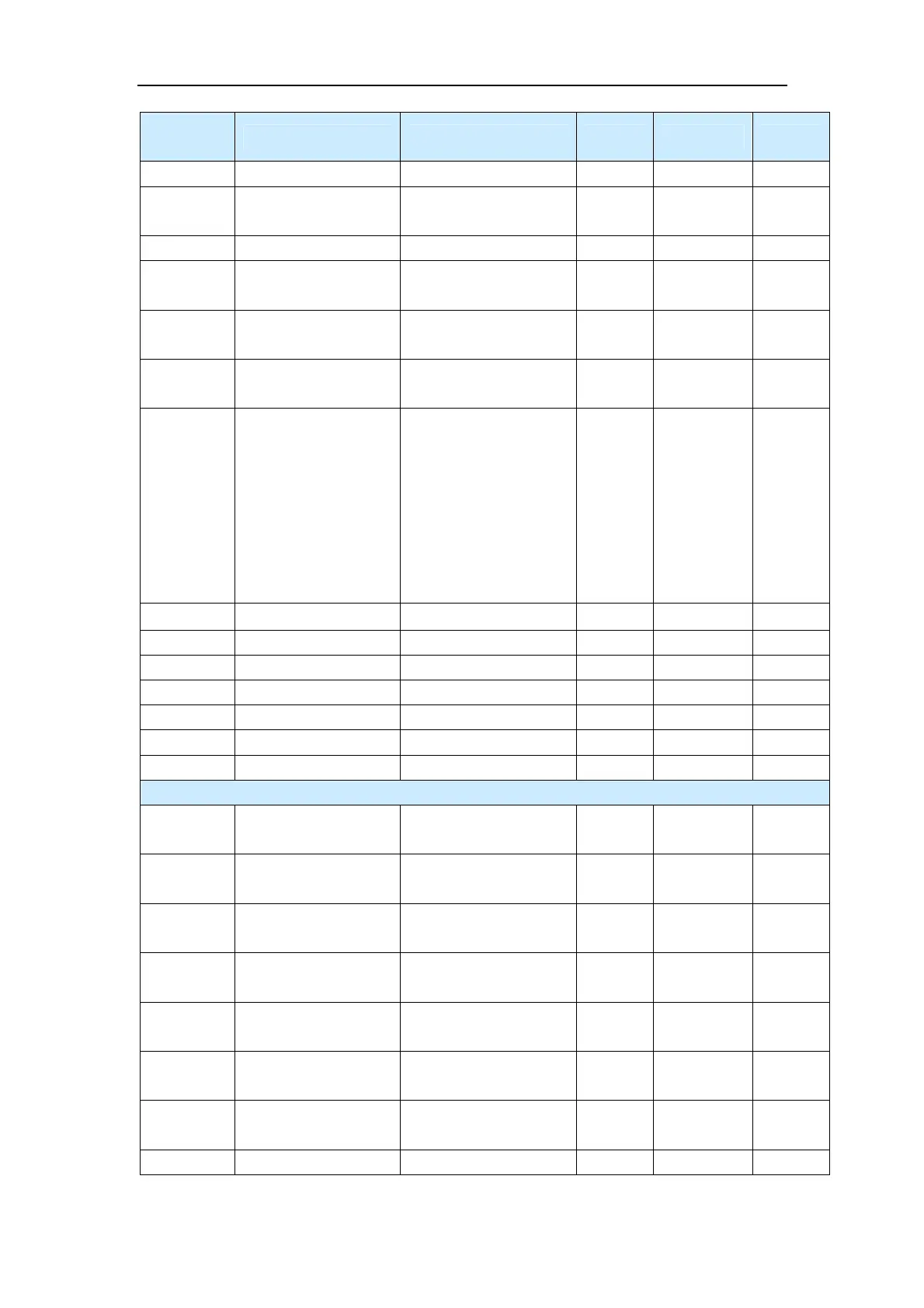
Function
Code
Parameter Name Setting Range Min. Unit Default Property
gain 2
F2-04
Speed loop
integration time 2
0.01–10.00s 0.01s 0.30s
☆
F2-05 Switchover frequency 2 F2-02 to max. frequency 0.01 Hz 10.00 Hz
☆
F2-06
Slip compensation
coefficient
50%–200% 1% 100%
☆
F2-07
Time constant of speed
loop filter
0.000–0.100s 0.001s 0.000s
☆
F2-08 Torque control
0: Invalid
1: Valid
1 0
☆
F2-09
Torque upper limit
source
0: F2-10
1: AI1
2: AI2
3: AI3
4: Reserved
5: Via communication
Analog input corresponds
to F2-10.
1 0
☆
F2-10 Torque upper limit 0.0%–250.0% 0.1% 200.0%
☆
F2-11 Encoder PPR 1–65535 1 1024
★
F2-12 Reserved - - -
★
F2-13 Shaft D current loop Kp 0–65535 1 50
★
F2-14 Shaft D current loop Ki 0–65535 1 50
★
F2-15 Shaft Q current loop Kp 0–65535 1 50
★
F2-16 Shaft Q current loop Ki 0–65535 1 50
★
Group F9: Fault and Protection Parameters
F9-00
Motor overload
protection selection
0: Disabled
1: Enabled
1 1
☆
F9-01
Motor overload
protection gain
0.20–10.00
0.01 1.00
☆
F9-04
Braking voltage
threshold
120%–150% (100%
corresponding to 530 V)
1% 130%
☆
F9-12
Input phase loss
protection
0: Disabled
1: Enabled
1 1
☆
F9-13
Output phase loss
protection
0: Disabled
1: Enabled
1 1
☆
F9-14
Runaway speed
deviation
0.50–50.00 Hz 0.01 Hz 10.00 Hz
☆
F9-15
Detection time of
runaway fault
0.0s: No detection
0.1s–20.0s
0.1 10.0s
☆
F9-16 Motor temperature 0: Disabled 1 0
☆
 Loading...
Loading...

