Structure
The SCORBOT-ER IX is a vertical articulated robot, with five revolute joints. With
gripper attached, the robot has six degrees of freedom. This design permits the
end effector to be positioned and oriented arbitrarily within a large work space.
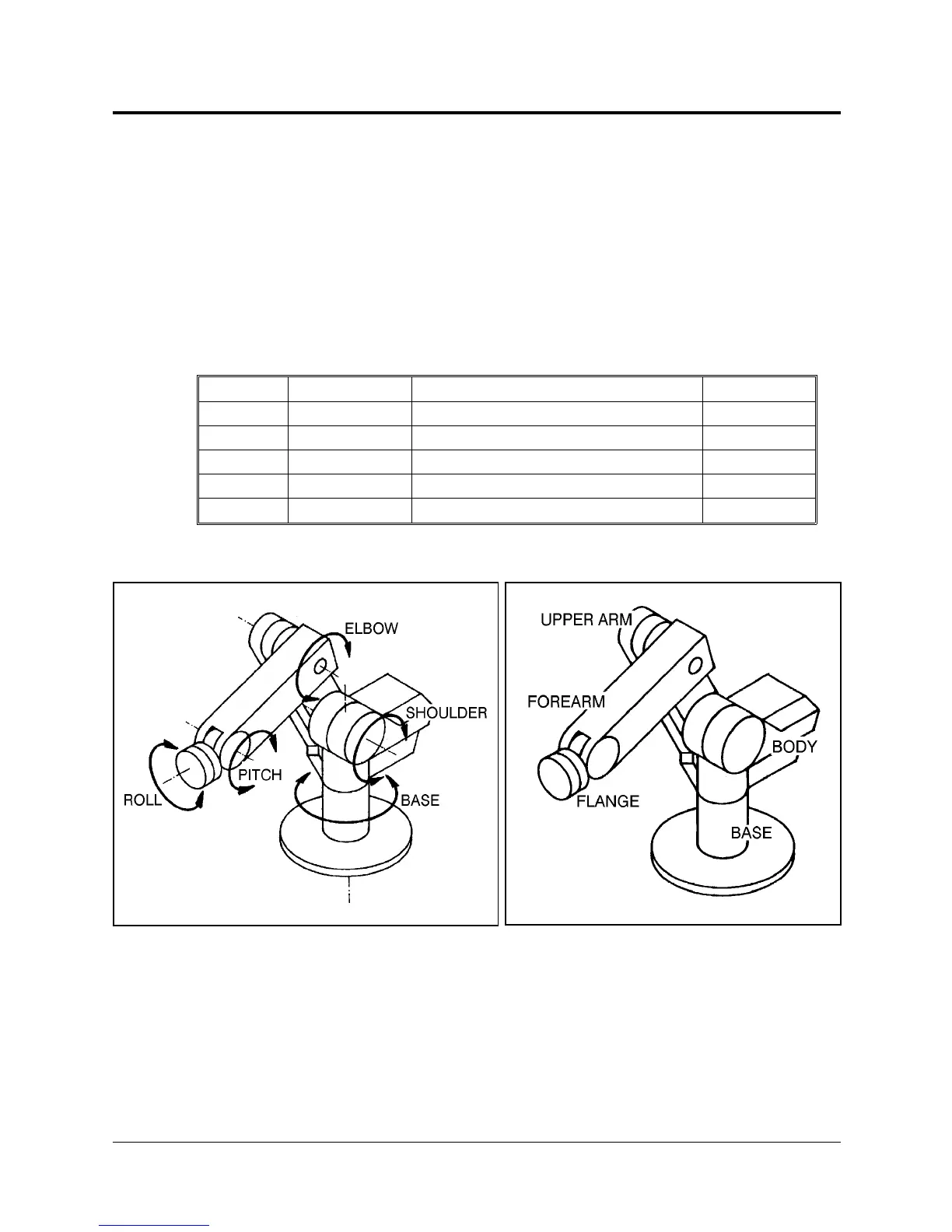
Figures 2-1 and 2-2 identify the joints and links of the mechanical arm.
Each joint is driven by a permanent magnet DC motor via a Harmonic Drive gear
transmission and timing belt.
The movements of the joints are described in the following table:
Axis No. Joint Name Motion Motor No.
1 Base Rotates the body. 1
2 Shoulder Raises and lowers the upper arm. 2
3 Elbow Raises and lowers the forearm. 3
4 Wrist Pitch Raises and lowers the end effector. 4
5 Wrist Roll Rotates the end effector. 5
Figure 2-1: SCORBOT-ER IX Joints
Figure 2-2: SCORBOT-ER IX Links
SCORBOT-ER IX 2 - 2 User’s Manual
9603