CHAPTER
2
Specifications
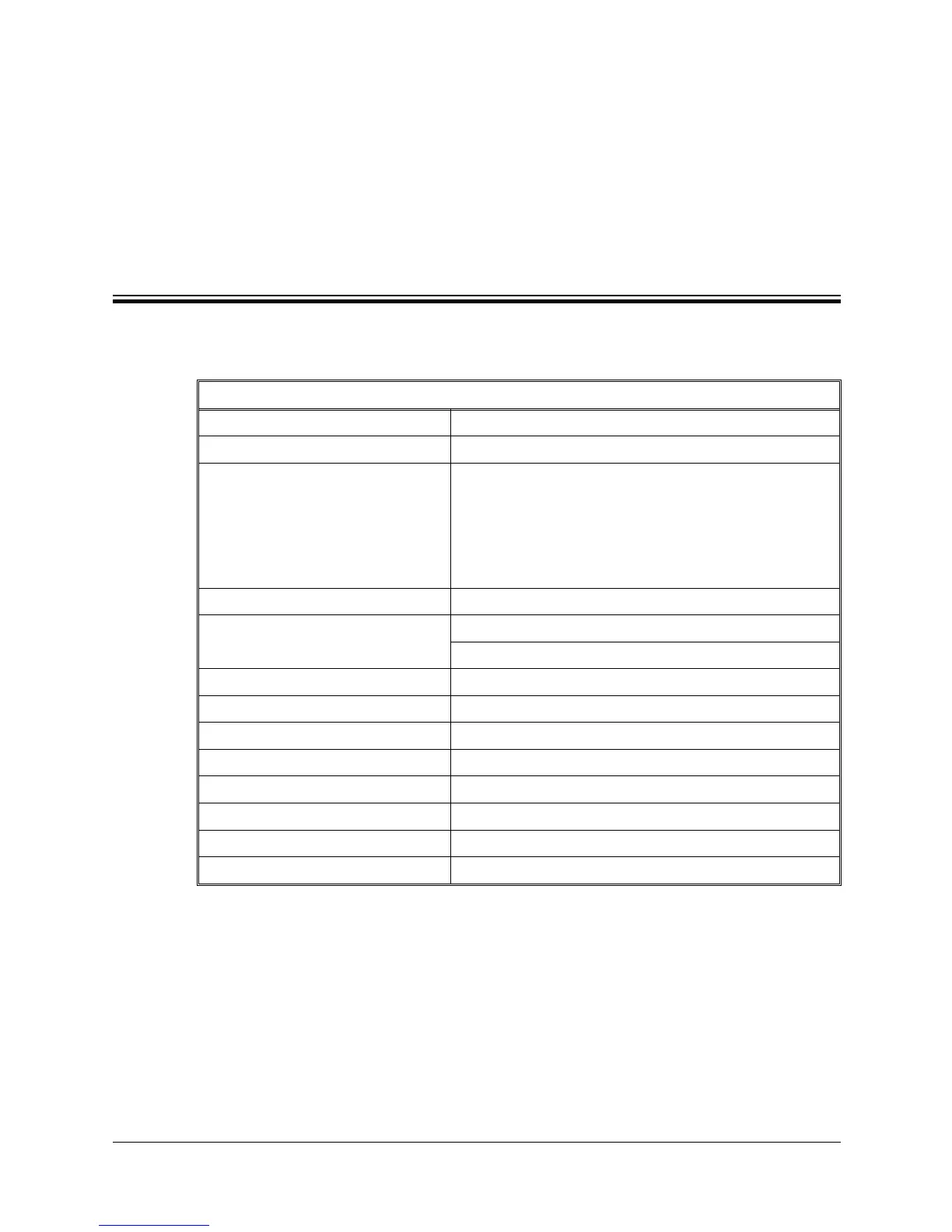
The following table gives the specifications of the SCORBOT-ER IX robot arm.
Robot Arm Specifications
Mechanical Structure Vertical articulated, enclosed casting
Number of Axes 5 plus gripper
Axis Movement
Axis 1: Base rotation
Axis 2: Shoulder rotation
Axis 3: Elbow rotation
Axis 4: Wrist pitch
Axis 5: Wrist roll
Axis Range Effective Speed
270° 79°/sec 112°/sec
145° 68°/sec 99°/sec
210° 76°/sec 112°/sec
196° 87°/sec 133°/sec
737° 166°/sec
Maximum Operating Radius 691mm (27.2") without gripper
End Effector: options:
Pneumatic Gripper
Electric DC Servo Gripper
Hard Home Fixed position on all axes
Feedback Incremental optical encoders with index pulse
Actuators DC servo motors
Transmission Harmonic Drive gears and timing belts
Maximum Payload 2 kg (4.4 lb.), including gripper
Position Repeatability
±
0.09mm (0.0035")
Weight 38 kg (83 lb.)
Ambient Operating Temperature 2°–40°C (36°–104°F)
User’s Manual 2 - 1 SCORBOT-ER IX
9603