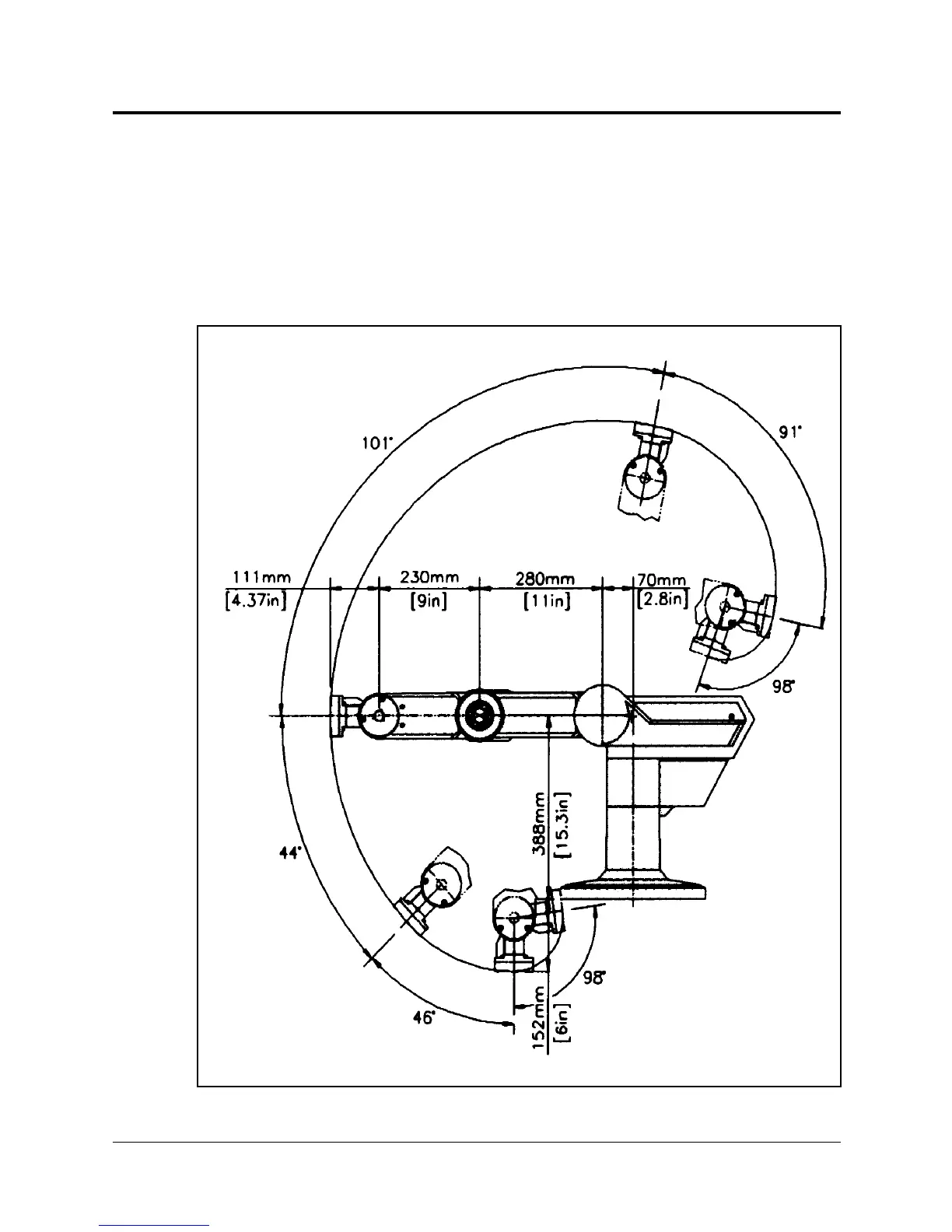
Work Envelope
The length of the links and the degree of rotation of the joints determine the
robot’s work envelope. Figure 2-3 shows the dimensions and reach of the
SCORBOT-ER IX, while Figure 2-4 gives a top view of the robot’s work envelope.
The base of the robot is normally fixed to a stationary work surface. It may,
however, be attached to a slidebase, resulting in an extended working range.
Figure 2-3: Operating Range (Side View)
User’s Manual 2 - 3 SCORBOT-ER IX
9603