Goodrive350 IP55 High-ingress Protection Series VFD Function parameter list
-190-
that, the phase-locked loop is enabled.
Setting range: 0.00–655.35
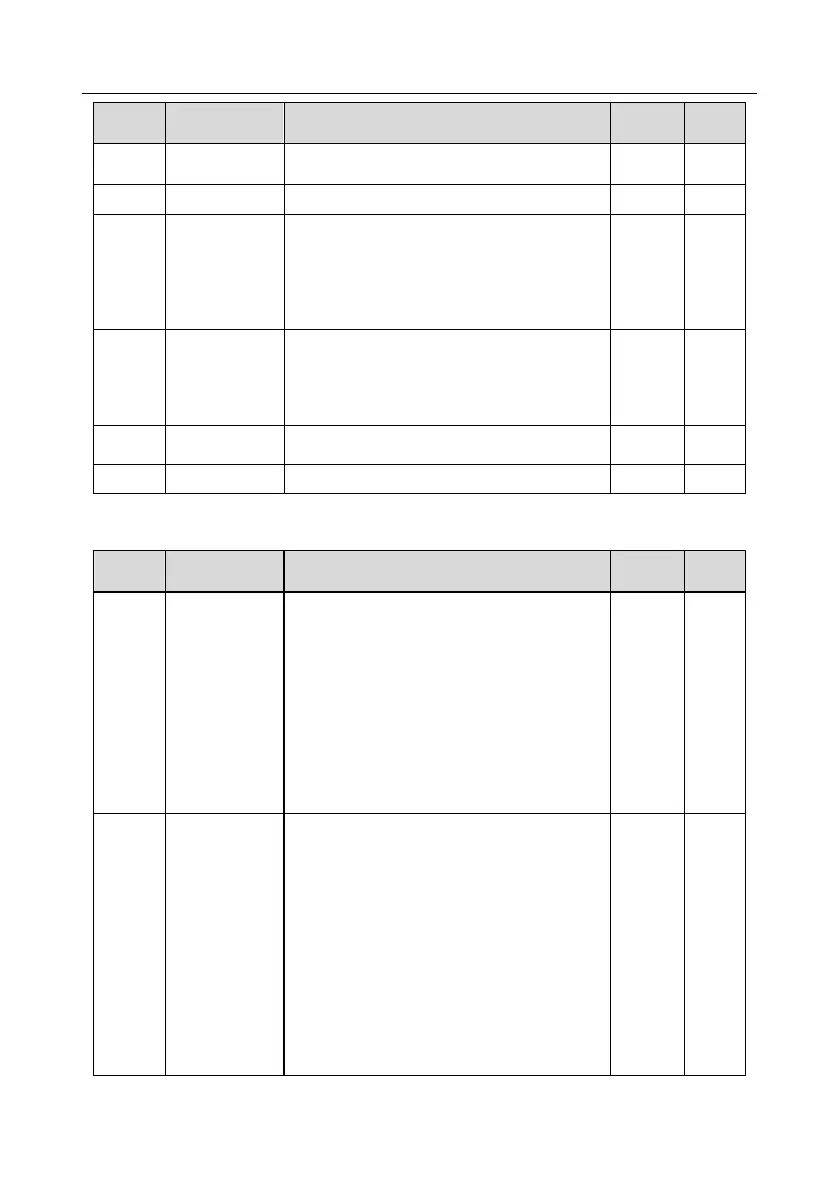
Maladjustment
detection time
This parameter is used to adjust the
responsiveness of anti-maladjustment function.
If the load inertia is large, increase the value of
this parameter properly, however, the
responsiveness may slow down accordingly.
Setting range: 0.0–10.0s
High-frequency
compensation
coefficient of
synchronous
motor
This parameter is valid when the motor speed
exceeds the rated speed. If motor oscillation
occurred, adjust this parameter properly.
Setting range: 0.0–100.0%
High-frequency
injection current
0–300.0% (of the rated VFD output current)
P14––Serial communication function
Local
communication
address
Setting range: 1–247
When the master is writing frames, and the
slave communication address is set to 0, it is the
broadcast communication address, and all the
slaves on the Modbus/Modbus TCP bus will
accept this frame, but the slave never responds.
Local communication address is unique in the
communication network, which is the basis for
point-to-point communication between the upper
computer and the VFD.
Note: The slave address cannot be set to 0.
Communication
baud rate setup
This parameter is used to set the data
transmission speed between upper computer
and the VFD.
0: 1200BPS
1: 2400BPS
2: 4800BPS
3: 9600BPS
4: 19200BPS
5: 38400BPS
6: 57600BPS
7: 115200BPS
Note: Baud rate of the upper computer must be
the same with the VFD; otherwise,
 Loading...
Loading...