JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors 285
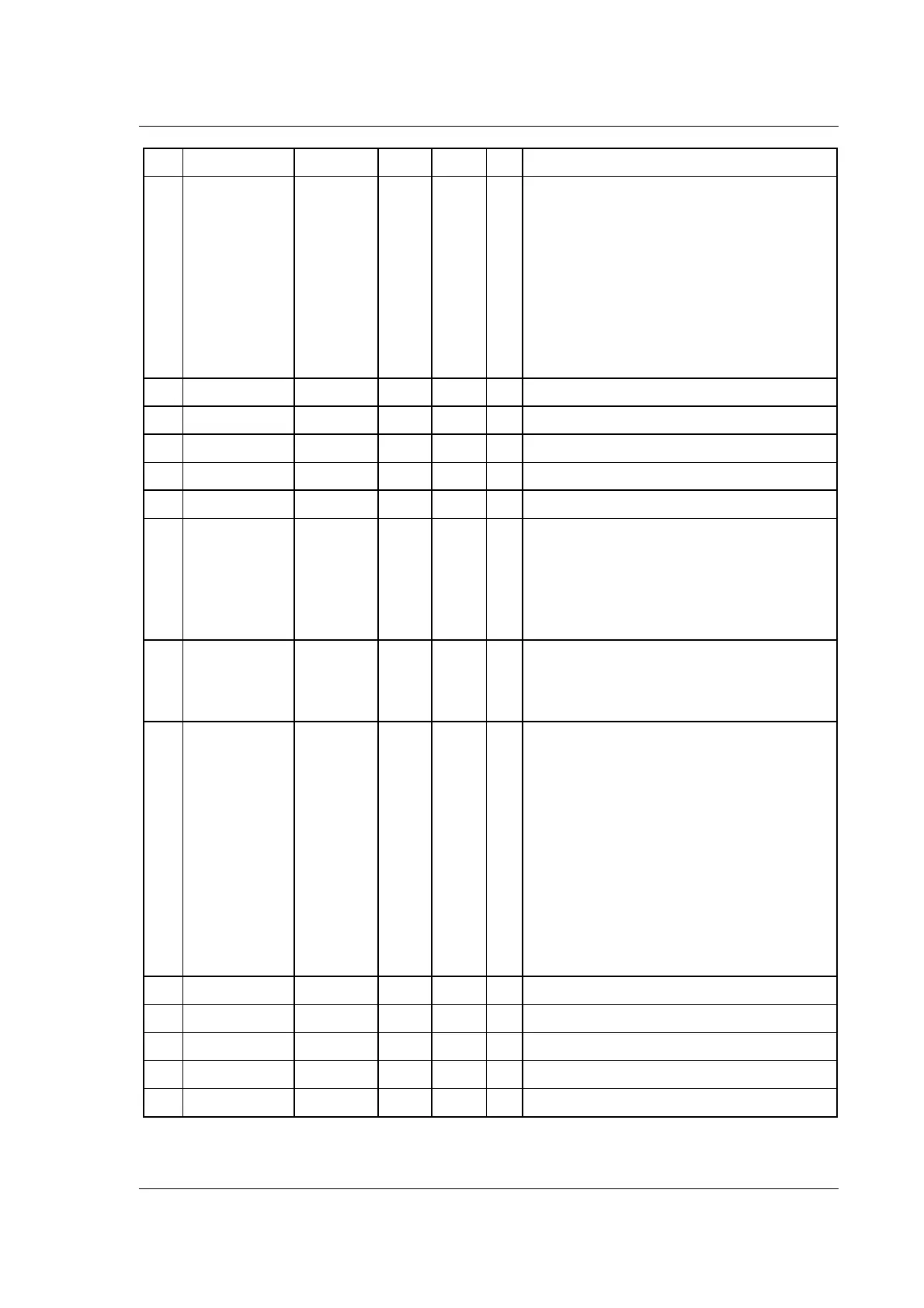
12.3 Motor registers MAC400 - 4500
TT1510GB
Reg.
Nr.
Firmware /
MacRegIo Name
MacTalk
Name
Range/
Default
Size /
Access
Unit
Description
107
ent)
Na /
0
Word /
RW
-
Shows various status bits for the currently mounted Gen2
module.
For the MAC00-B41:
Bit 0: Digital Output overload. This shows the staus of the
output driver chip that controls the six digital outputs. The
overload status can be set if either an overcurrent
condition or a too high temperature is detected. This
status bit is cleared when these conditions are no longer
present.
Bit 1: CVO voltage detected. This bit reflects if the voltage
at the CVO terminal is above a hardwired default value.
CVO is the supply voltage for the digital outputs.
108
(not present)
Na /
0
Word /
RW
-
N/U
109
(not present)
Na /
0
Word /
RW
-
N/U
110
(not present)
Na /
0
Word /
RW
-
N/U
111
(not present)
Na /
0
Word /
RW
-
N/U
112
(not present)
Na /
0
Word /
RW
-
N/U
113
B41_DO /
Digital outputs
I/O
management
Na /
0
Word /
RW
-
Bits [5:0] of this register controls the digital outputs O6..O1
on the MAC00-B41 module. Each bit that is set here will
enable the corresponding PNP output.
It is possible to overwrite these bits by using Registers
115-120, see below.
Also Reg215, IO_POLARITY, will invert the value of these
bits before there are written to the hardware.
114
B41_DOSTATUS
I/O
management
Na /
0
Word /
RW
-
Shows the status of each of the six digital outputs actually
written to the hardware.
This value will be Reg113, possibly modified by Regs115 -
120 and finally possibly having some bits inverted by
Reg215.
115
MAC00_10 /
B41_CONF0
(not present)
Na /
0
Word /
RW
-
Controls
IO1
on MAC00-B41 (bit 0 in B41_DO).
Each of the B41_CONF5..CONF0 registers can be used
to modify the corresponding digital outputs by effectively
overwriting bits [5:0] in Reg113, B41_DO.
They can be set to replace the corresponding bit in
B41_DO with any bit from any motor register in the range
1..254, typically status bits from Reg35, ERR_STAT, for
instance bits INPOS or ANY_ERR.
Bits [31:24]: reserved
Bits [23:16]: Source register number, 1..254.
Bits [15:5]: Reserved
Bits [4:0]: Bit number in source register to use.
Reg215, IO_POLARITY, will be applied after these
registers to allow general inversion of each digital output
bit.
116 MAC00_11 /
B41_CONF1
(not present)
Na /
0
Word /
RW
-
Controls
IO2
on MAC00-B41 (bit 1 in B41_DO).
See Reg115, B41_CONF0 for description.
117
B41_CONF2
(not present)
Na /
0
Word /
RW
-
Controls
IO3
on MAC00-B41 (bit 2 in B41_DO).
See Reg115, B41_CONF0 for description.
118
B41_CONF3
(not present)
Na /
0
Word /
RW
-
Controls
IO4
on MAC00-B41 (bit 3 in B41_DO).
See Reg115, B41_CONF0 for description.
119
B41_CONF4
(not present)
Na /
0
Word /
RW
-
Controls
IO5
on MAC00-B41 (bit 4 in B41_DO).
See Reg115, B41_CONF0 for description.
120 MAC
B41_CONF5
(not present)
Na /
0
Word /
RW
-
Controls
IO6
on MAC00-B41 (bit 5 in B41_DO).
See Reg115, B41_CONF0 for description.