JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors 69
3.5 CiA® DSP-402 drive profile
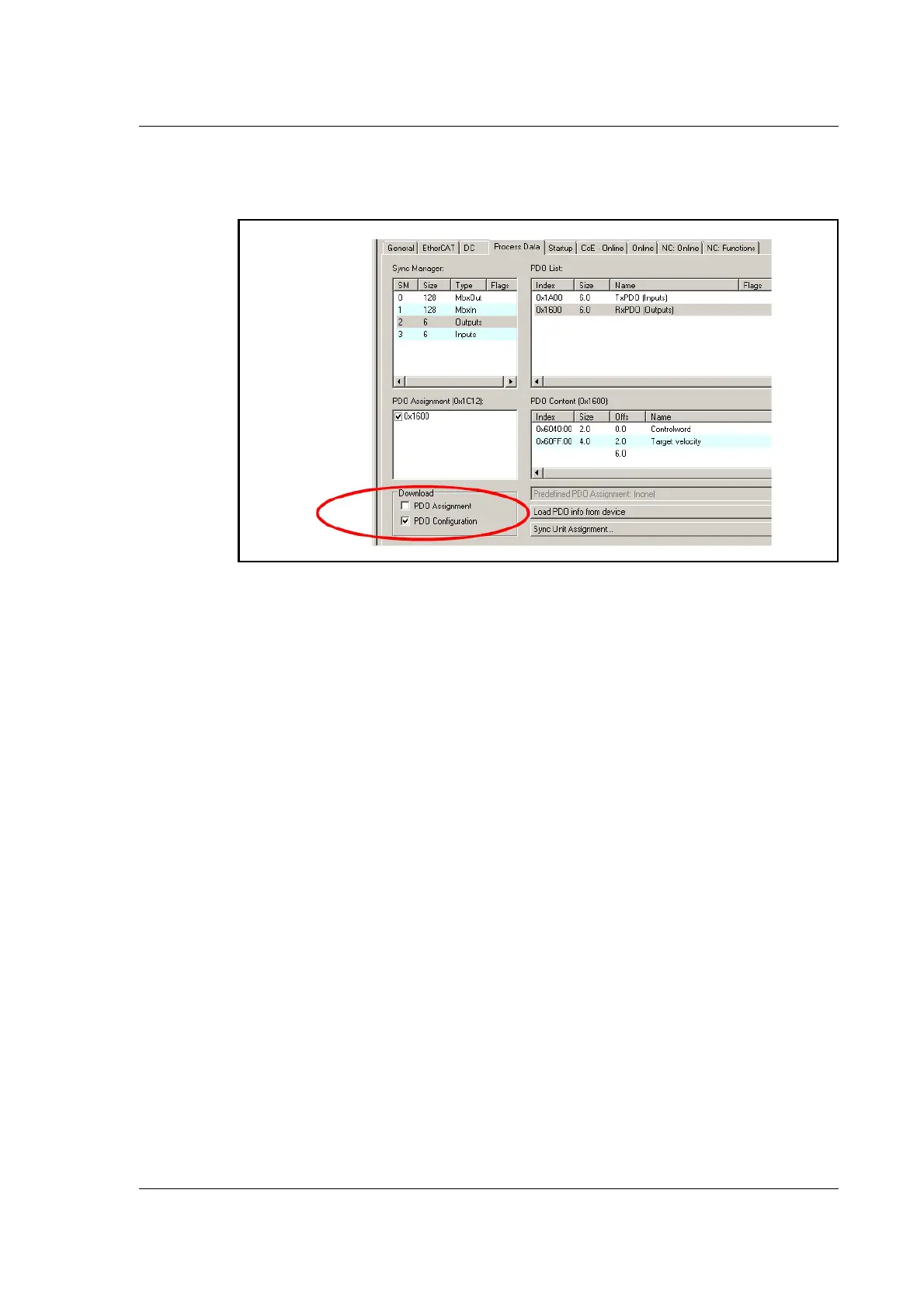
Step 11.
Make sure the “PDO assignment” is unchecked and “PDO Configuration” is cheked.
Please see below.
If wanting to enable this mode as startup mode in TwinCAT then please see the proce-
dure in the previous paragraph “Cyclic synchron position mode”, and just change the
“Data value to “09”, instead of “08”.
Note ! Changes will only become effective after reconfiguring and restarting the
EtherCAT master !
Please note:
The torque limit that is used during the mode can be set via object 6072h beforehand.
The register L1 (object 2012 subindex 81) is used to select the load factor when the
mode is started. If a different load factor is required, this register must be set correctly.
Cyclic Synchron Torque mode (cst)
This mode is used when synchronization between several drives are needed in torque
mode. When using CST mode it is highly recommneded to use Distributed Clock, in or
-
der not to loose any cyclic frames. To use this mode the default PDO needs to be
changed. Please follow the steps 1-11 from above in "Cyclic Synchron Velocity mode"
where the inserted object should be 0x6071 (target torque) instead of object 0x60FF.
And then follow the steps 1-4 from “Cyclic synchron position mode”, and just change the
“Data value to “0A”, instead of “08”, if wanting the motor to start up in CST mode.
Notes ! Changes will only become effective after reconfiguring and restarting the Ether-
CAT master !
The register L1 (object 2012 subindex 81) is used to select the load factor when
the mode is started. If a different load factor is required, this register must be
set correctly.
3.5.12 Shift time.
The shift time is the nominal time the cyclic EtherCAT frames are sent before the sync0
pulse is activated. At normal circumstances this setup should not be changed, as it will
affect all the devices in the network.