805.76
K-Commander Loss-in-Weight Programming
Rev: G Produced by the K-Tron Institute
LWF Page 09: Control or Tuning Parameters, Continued
Page 09
variable list
con't
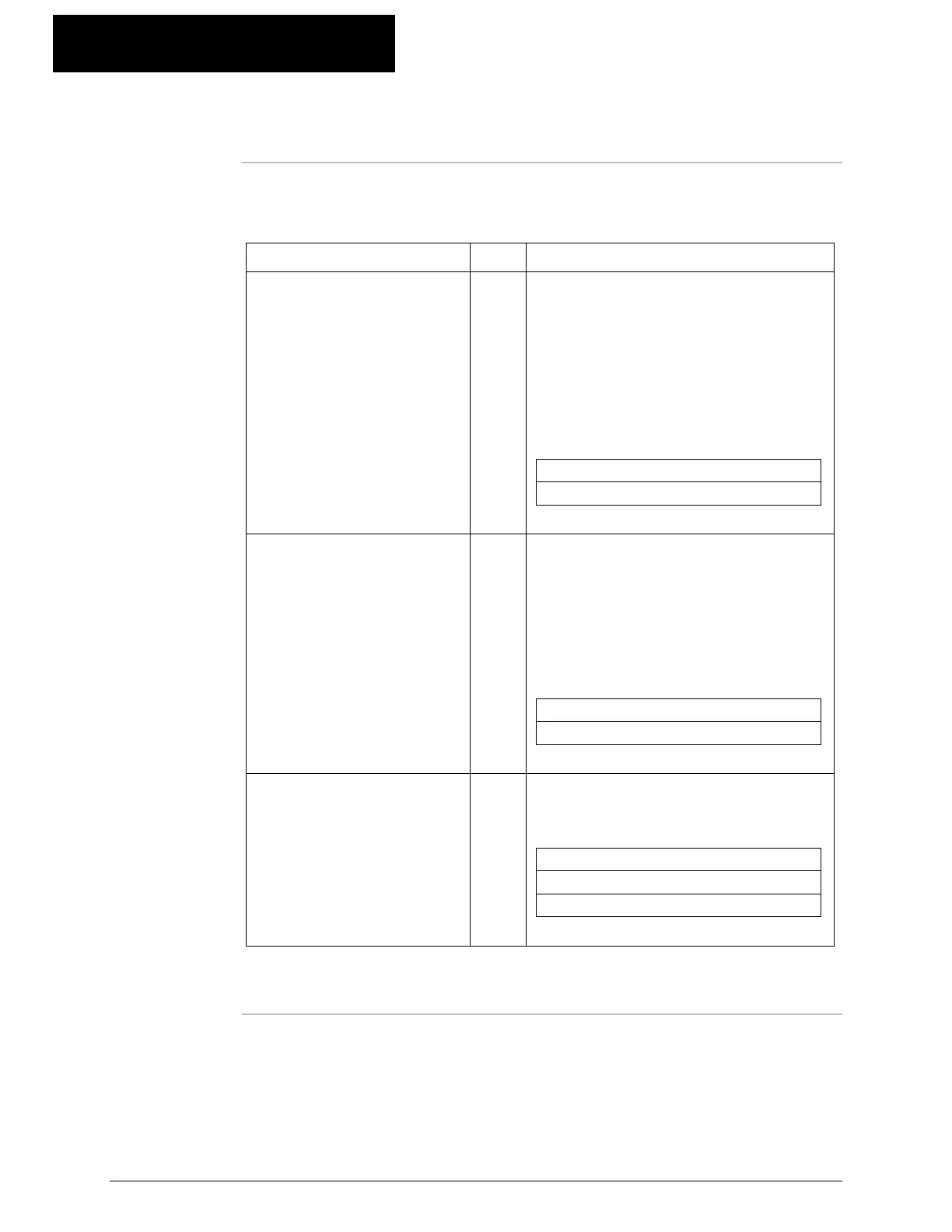
Variable Name Edit? Description
Desired Std Deviation $ This value is a function of the
variation of the massflow data and
is used by the controller to set the
Kalman filter gain function for
aggressive or sluggish control. This
number is calculated by the
Kalman filter when the Adaptive
Tuning is enabled.
Range of Values
01. to 500
Motor Control Gain $ This number sets the Integral gain
of the controller. The large the
value , the more aggressive the
control action. This number is
calculated by the Kalman filter
when the Adaptive Tuning is
enabled.
Range of Values
1 to 999
Massflow Filter Length ` The larger this value is, the more
stable the massflow display will be.
This value has no affect on control.
Range of Values
1 to 300 seconds
Default value is 5 seconds
Continued on next page