A
A
C
C
S
S
8
8
0
0
6
6
D
D
i
i
g
g
i
i
t
t
a
a
l
l
A
A
C
C
S
S
e
e
r
r
v
v
o
o
d
d
r
r
i
i
v
v
e
e
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369 36 Website: www.leadshine.com
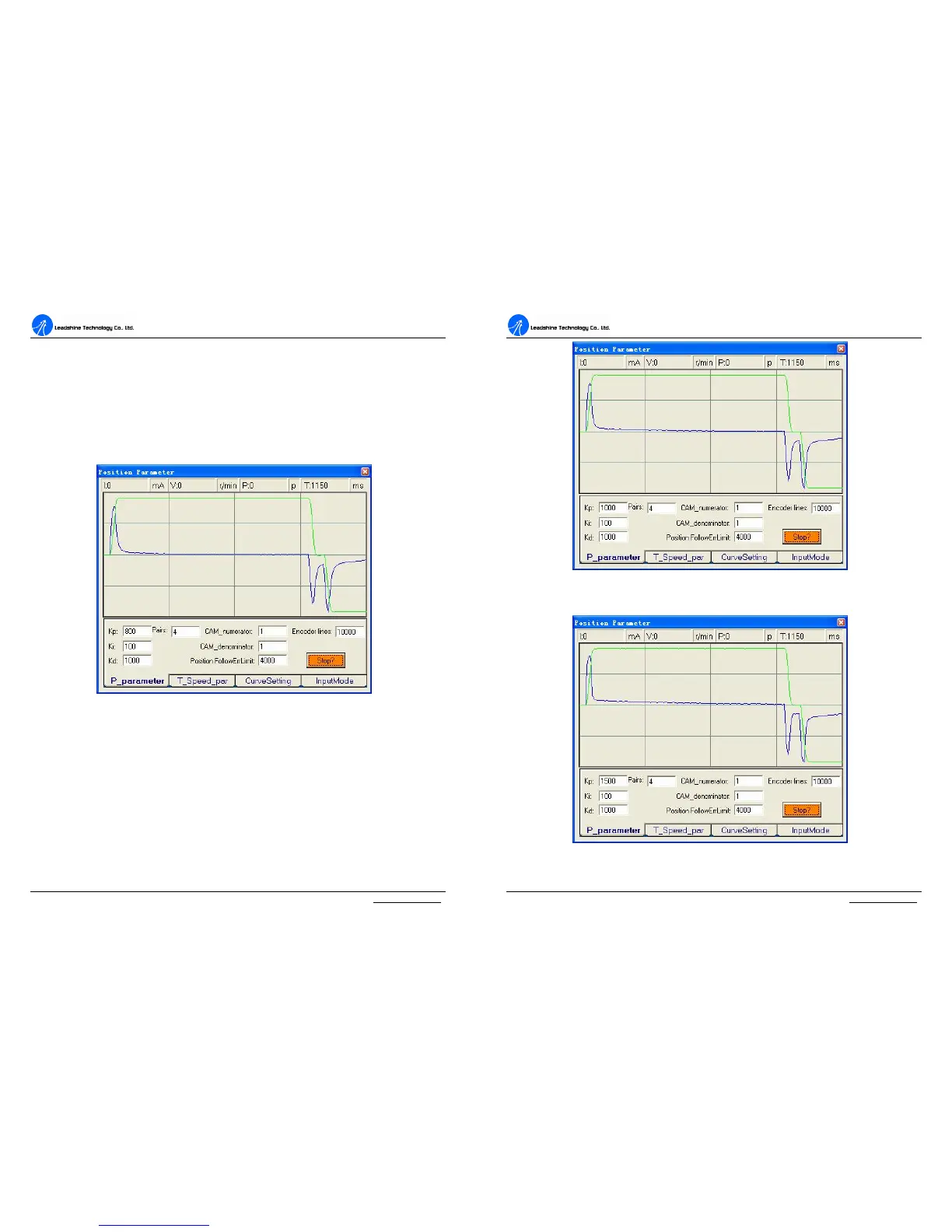
Although a smooth velocity curve have been gotten in Figure 35, we can see that the
position following error is still too large to accept. And this can be improved by
increasing Ki value. See Figure 36. However, we can see the system response in
Figure 35 is already Over Damped, namely too much damping has caused the
response to be sluggish. This can be improved by increasing Kp or reducing Kd. See
Figure 37 and Figure 38. Here we try to improve the performances by increasing Kp.
Figure 36: Position following error curve and velocity curve (Kp=800, Ki=100 and Kd=1000)
A
A
C
C
S
S
8
8
0
0
6
6
D
D
i
i
g
g
i
i
t
t
a
a
l
l
A
A
C
C
S
S
e
e
r
r
v
v
o
o
d
d
r
r
i
i
v
v
e
e
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369 37 Website: www.leadshine.com
Figure 37: Position following error curve and velocity curve (Kp=1000, Ki=100 and Kd=1000)
Figure 38: Position following error curve and velocity curve (Kp=1500, Ki=100 and Kd=1000)