CS2RS Series Modbus RS485 Closed Loop Stepper Drive User Manual
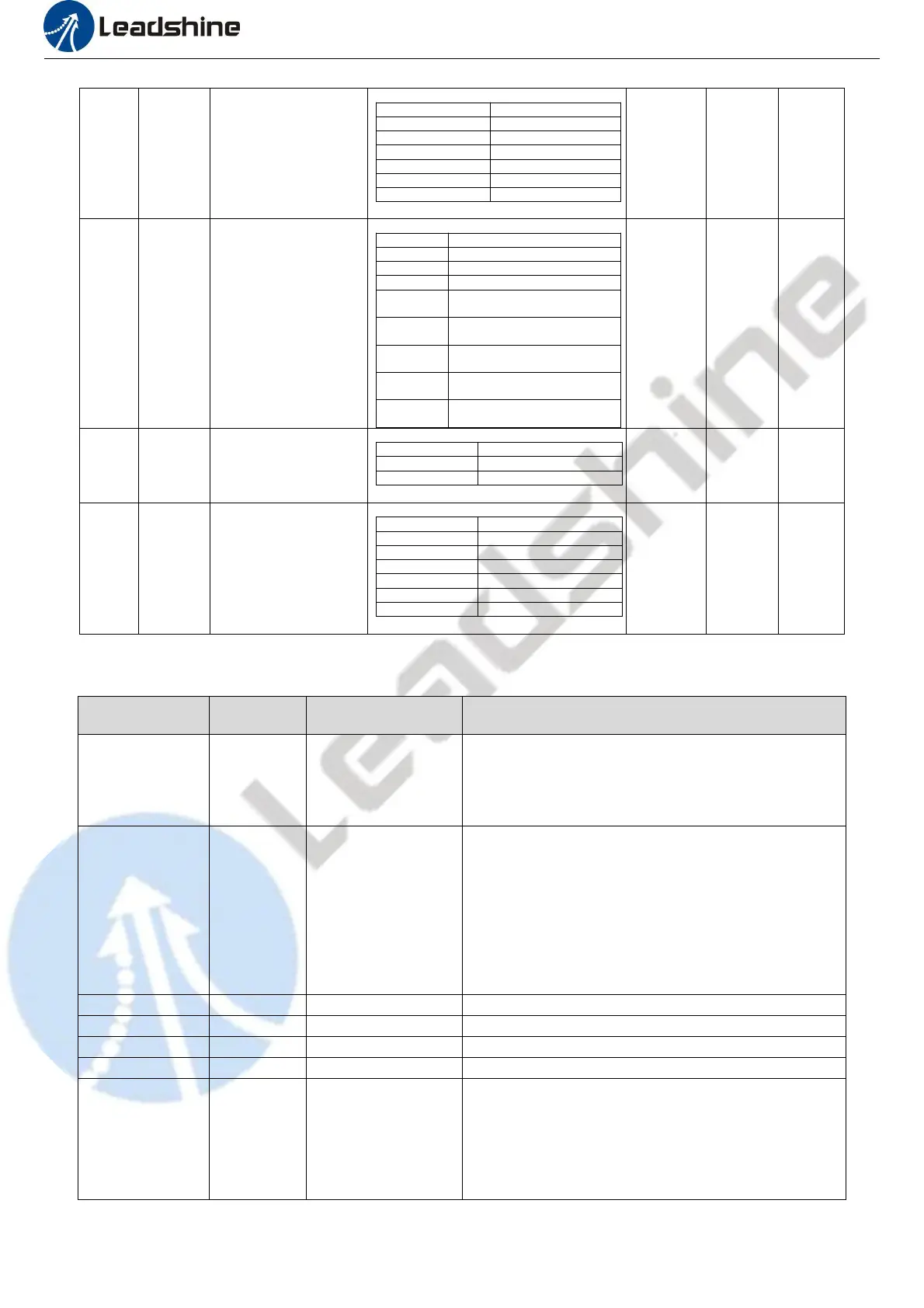
Save all parameters to EEPROM
Parameter reset(exclude motor
parameters)
All parameters are reset to
factory
Save all mappings into
EEPROM
JOG CW (Need to write once at
least 50ms)
JOG CCW (Need to write once
at least 50ms)
Save parameter status word
2. PR Parameters:
PR parameter data type is 16-bit data, one parameter occupies one register (one 16-bit register = 2 8-bit bytes).
Parameter NO.
in PC software
PR global control function
Bit0: CTRG effective edge. 0--rising edge, 1--double edges
Bit1: Soft limit.. 0--disable, 1--enable
Bit2: Homing after power on. 0--no, 1--yes
Bit4: CTRG trigger type. 0--refer to bit0, 1--level trigger
(1) Write commands to 0x6002 to select and trigger each action:
Write 0x1P (“P” = 0-15 ), run the path P motion;
Write 0x20, homing;
Write 0x21, manually set to zero position;
Write 0x40, quick stop;
(2) Read 0x6002 can check the running path NO. and status:
Return “0x000P”, path P motion complete, can receive new motion command;
Return “0x001P or 0020 or 0040”, not yet responding to commands;
Return 0x010P, path P motion is running;
Return 0x0200, command completed and waiting for positioning;
Return 0x020P, a position following error during path P;
Soft limit positive high bits
Soft limit positive low bits
Soft limit negative high bits
Soft limit negative low bits
Bit0: homing direction, 0--CW, 1--CCW;
Bit1: Whether to move to the specified position after homing, 0--no, 1--yes;
Bit2- bit3: homing method, 00--limit switch homing, 01--home switch homing,
10--Z signal homing
Note:
(1) Write 0x21 to 0x6002, manually set the current point to zero position)
(2) Other methods are not valid