Function library
Thermal motor monitoring, error detection
7−83
L
EDB82MV752 EN 5.2
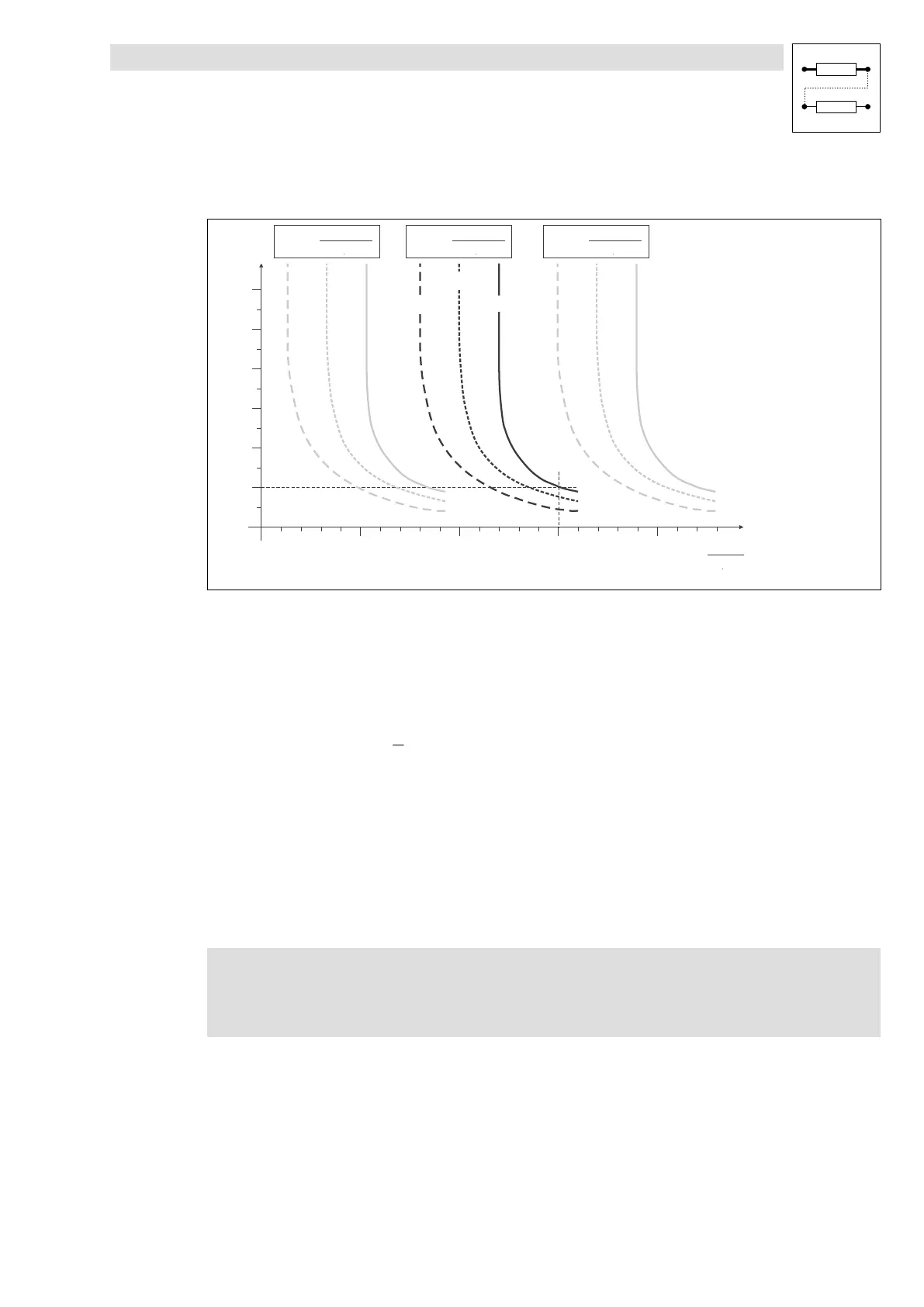
The controller switches off with fault OC6, if the apparent motor current is higher than the rated motor
current over a longer period of time.
60
180
240
300
360
t [s]
0.5
0
0
1.0
1.5 2.0
C0054
I
r
120
f=0Hz
f=20Hz
f>40Hz
I x 100 %
I
r
N
C0120 <
I x 100 %
I
r
N
C0120 =
I x 100 %
I
r
N
C0120 >
8200vec523
Fig. 7−16 Tripping characteristic of I
2
t monitoring
f Output frequency
t Time to trip
I
r
Rated controller current at a chopper frequency of 8 kHz
I
r
Rated motor current
C0054 Apparent motor current
Example:
C0120
I
r
I
N
100%
C0054 = 1.5 x rated motor current
The controller switches off at output frequencies f > 40 Hz after approx. 60 s with fault OC6.
Tip
To prevent motors with forced ventilation from starting too early, this function can be
deactivated.
The current limits C0022 and C0023 only have indirect influence on the I
2
t calculation. It is
possible to prevent motor operation with a maximum of possible load with settings under
C0022 and C0023.
) Note!
If the controller operates at increased rated power, the I
2
t monitoring starts if C0120
is set lower than 100%.
 Loading...
Loading...