Commissioning
Selection of the operating mode
Operating mode "Interpolated Position Mode" (IP−Mode)
6
163
EDBCSXM064 EN 11.0
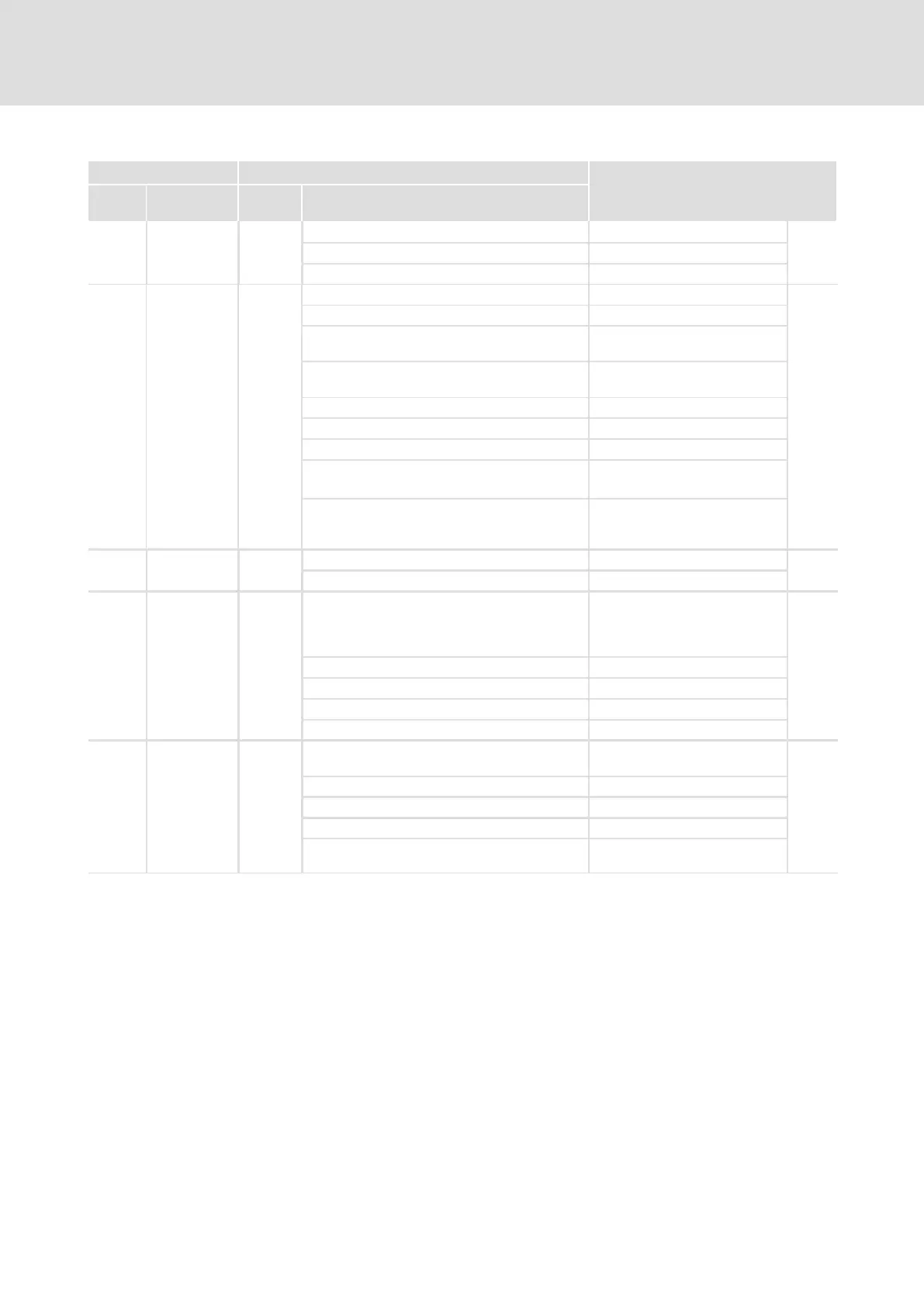
Code Possible settings IMPORTANT
No. Designation Lenze/
{Appl.}
Selection
C0911 MCTRL TP2
sel.
0
MCTRL touch probe signal source
0 Zero pulse of position encoder (C0490) X7/X8
1 Touch probe input TP2 X6/DI2
C3181 MonitorData 0
Monitor data selection
133
0 Free
1 MCTRL_nPos_a Actual position (16 bits) referred
to one revolution (rotor position)
2 DINT_TO_INT
(MCTRL_dnPosSet_p)
Following error ±2
15
3 MCTRL_nNAct_a Actual speed (n
max
= 2
14
)
4 MCTRL_nMAct_a Actual torque (M
max
= 2
14
)
5 MCTRL_nIAct_a Actual motor current (I
max
= 2
14
)
6 MCTRL_nDCVolt_a Actual DC−bus voltage
(2
14
¢ 1000 V)
7 PosLatchDiff Difference between actual
position and position at touch
probe (C6000)
C6000 LatchPosition 0 Position at touch probe
133
−2147483647 {1 inc} 2147483647
C6001 PosLatchAct 0
Activation:
At touch probe (X6/DI2 = HIGH),
the actual position is saved in
C6000.
133
0 Not active
1 Wait for rising edge
2 Wait for falling edge
3 Wait for rising or falling edge
C6002 TPReceived 0
Touch Probe (TP) recognised
Read only
0 No TP recognised
1 TP with rising edge recognised
2 TP with falling edge recognised
3 TP with rising or falling edge
recognised
 Loading...
Loading...




