Page 35 of 295
Input/output specifications: Hall potentiometer feedback
The Hall potentiometer feedback is an option on the LA20. This is especially suitable for wheelchairs or other applications as the LINAK control boxes
are not suitable of handling the signal.
• Hall potentiometer is close to be an absolute positioning system
• Hall potentiometer is a long lasting and wear-resistant positioning system
• Enables compact products to have precise positioning (potentiometer increase the product potential)
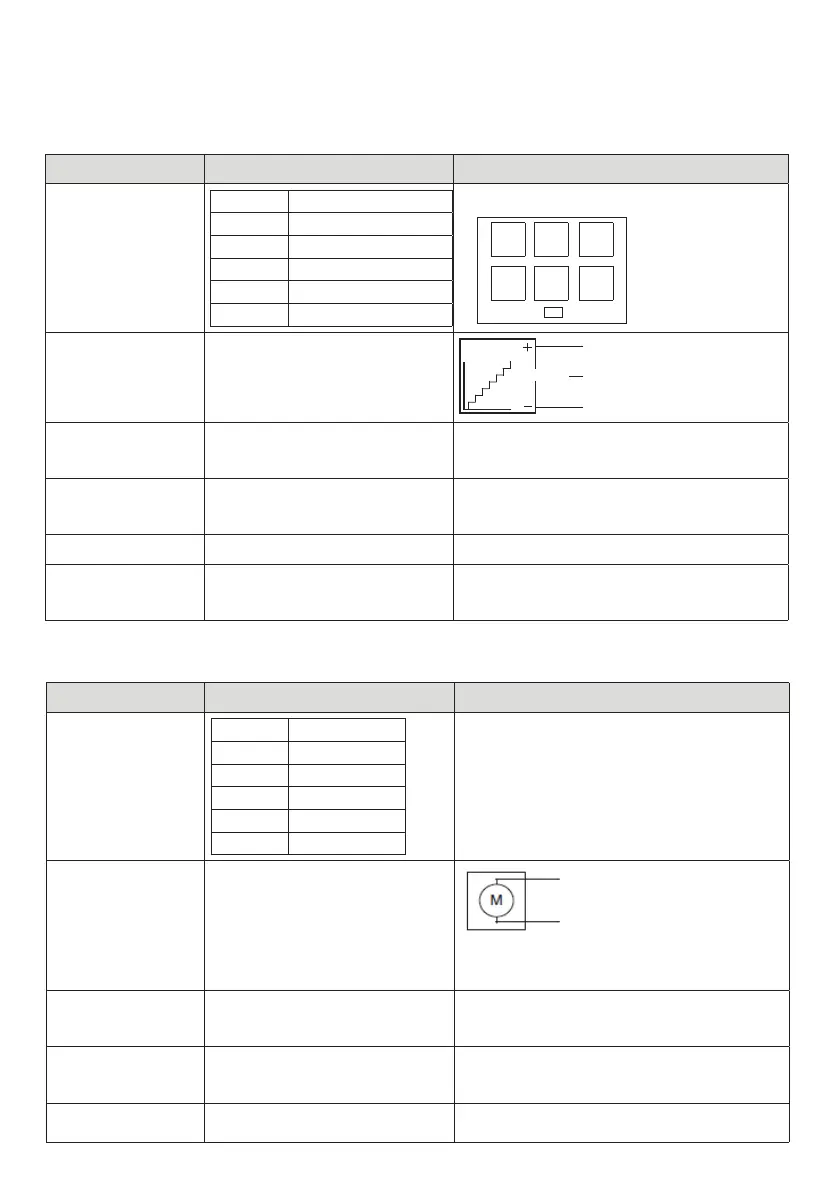
Item Specification Comment
Pin configuration
Pin 1 External supply: V0
Pin 2 VCC
Pin 3 M+ (motor/power)
Pin 4 Hall potentiometer
Pin 5 Not connected
Pin 6 M- (motor/power)
Actuator connector front view:
Description The actuator can be equipped with an
electronic circuit that gives a feedback signal
when the actuator moves.
SIGNALSIGNAL
Input voltage VCC = 5V – 12 V DC Feedback circuit has to be powered 1 second before and after
the motor runs and until the actuator has stopped. Cable
dimension 0.32 mm
3
(AWG22)
Output voltage 0.3V – 3.0V @ Load > 100kΩ
0.3V = EOS IN
3.0V = EOS OUT
Current consumption Current consumption is max 20 mA @ 12V Also when actuator is not running
Combinations The absolute positioning can be combined
with potential free switches, but cannot be
combined with relative positioning
6 5 4
3 2 1
VCC
OV (GND)
Output
Item Specification Comment
Pin connection
Pin 1
Pin 2
Pin 3 M+/-
Pin 4
Pin 5
Pin 6 M-/+
Outwards:
Pin 3: +
Pin 6: -
Inwards:
Pin 3: -
Pin 6: +
Description Permanent magnet DC motor, available in 12V
motor type A,
24V motor type B or
24V motor type G.
EMC noise from the motor is dealt with in LINAK A/S control
boxes. If using the actuator in another application, it is up to the
customer to be EMC compliant.
Input voltage Motor type A +/- 10%
Motor Type B +/- 10%
Motor Type G +/- 10%
Current
consumption
Motor type A, 0-1 - 1.3A depending on load
Motor Type B, 0-1 - 1.3A depending on load
Motor Type G, 0.1 - 1.0A depending on load
See curves for typical values
Speed
regulations
The motor can run with PWM regulation.
This could be used for soft start/stop etc.
Motor specification