Summary 67
• 1 Advanced I/O Engine that includes the following:
- 16 independent auxiliary sinking/sourcing I/O signals; 8 of which can be used
to receive application-specific user input, and 8 of which can be used to transm it
application-specific user output. The auxiliary input signals also have
interrupt-generation capabilities.
- 2 I/O command lists. The I/O command lists allow you to schedule I/O
commands to change the state of a bit of an I/O command register at a specified
time or counter value. The state of the bits can be routed to auxiliary output
signals or can be used, for example, to trigger a timer. A command list allows
software to schedule output events to occur at required moments, based on
elapsed time or specific input events (number of transitions on an auxiliary
input signal or a rotary decoder output signal).
- 2 integrated quadrature decoders. The quadrature decoders can decode input
received from rotary encoders or linear encoders with quadrature output. The
quadrature decoders can receive quadrature input on any two auxiliary input
signals, and support encoder frequencies of up to 40 kHz at 12 V and 20 kHz
at 24 v. An external source must power the encoder.
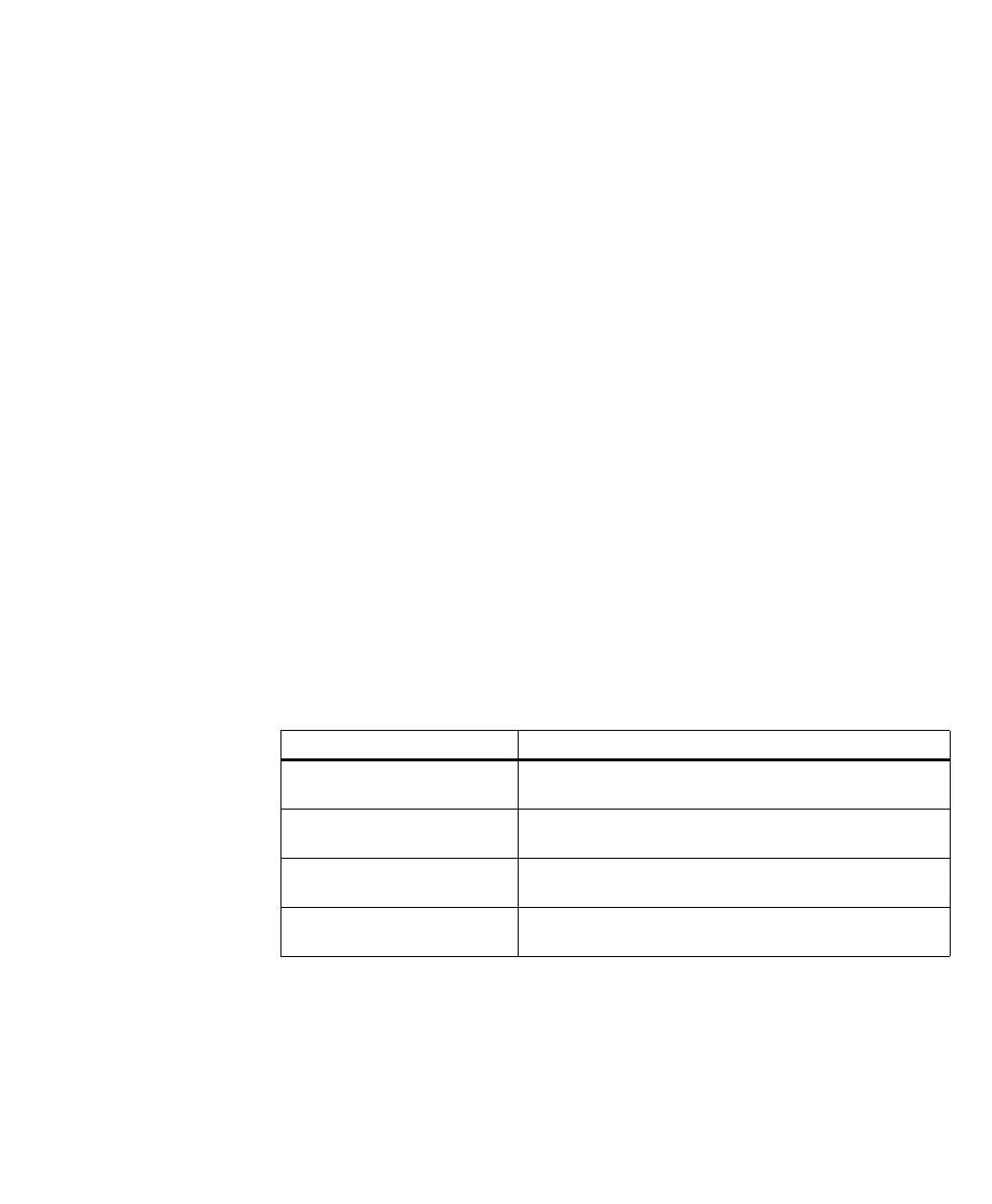
- 16 timers. Each timer is 32-bit and can count up to 4294967296 clock ticks
before resetting.The timers can use one of the following as a clock source:
Clock source Description
Matrox 4Sight EV6 Internally
generated clock
The internal clock has a period of 80 nsecs, which can be used to
program your timers.
Externally generated Define an appropriate auxiliary input signal to use as a timer-clock
input.
Based off another timer output Timer 1 can use a clock based on Timer 2 and Timer 2 can use a
clock based on Timer 1.
Based on a rotary decoder’s output In this case, the timer will act more as a counter because it is unlikely
that the rotary decoder’s output is periodic.