Page 37
Annex | Sensor Values, Data Format, Conversion
IF2030/ENETIP
A 3.7 ILD1750
RS422 The data are configured or selected via ASCII commands or via the web interface.
Baud rate 921600 baud ex factory
i
The sensor can continue to supply measurements to the RS422 output even while the sensor is communicating.
The digital measurements are output at the sensor as unsigned digital values (raw values). The sensors supply 3 bytes per value at
the output. These bytes are coded by the IF2030/ENETIP into 4 bytes, see Chap. 5.3.
The linearized measuring values can be converted in µm using the following formula:
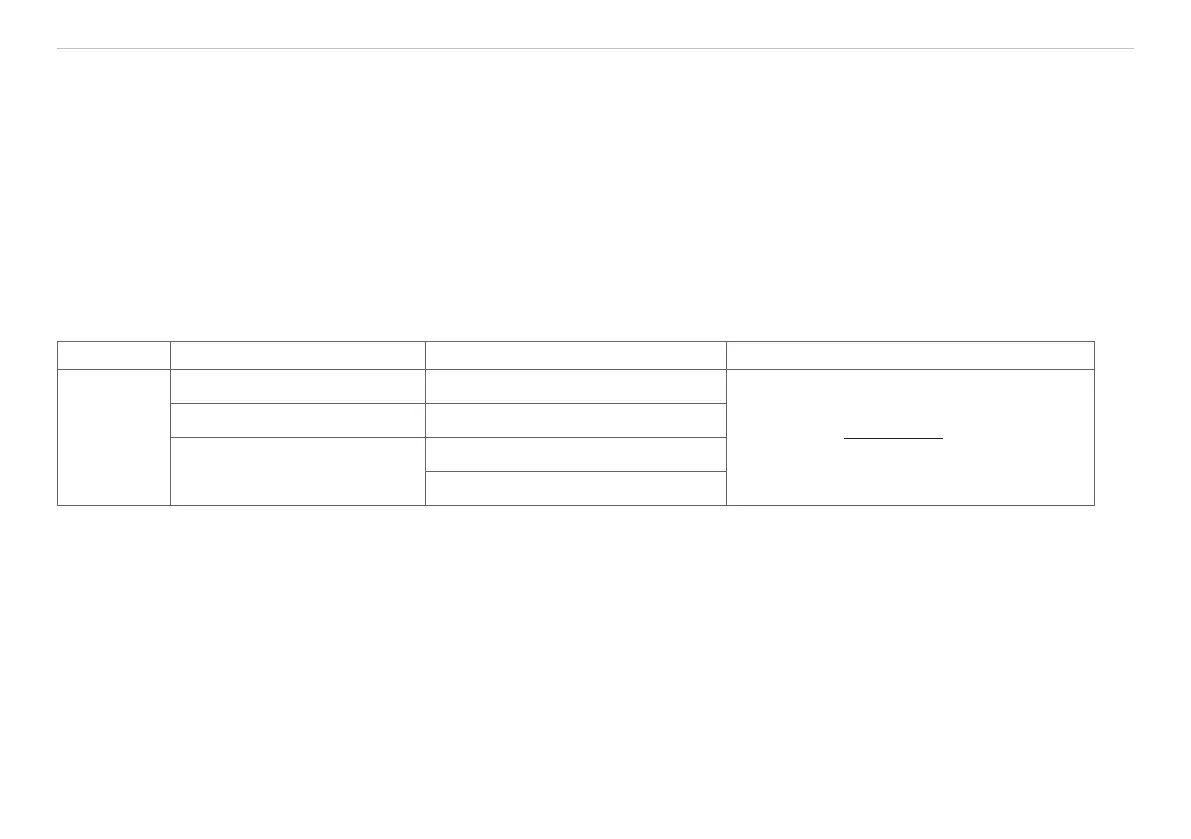
Value Variables Value range Formula
Distance
x = digital value [0; 230604]
d [mm] = * MR [mm]
x - 98232
65536
MR = measuring range [mm] {2/10/20/50/100/200/500/750}
d = distance [mm]
without Mastern [-0,01 MR; 1,01MR]
with Mastern [-2MR; 2MR]
Fig. 17 Calculation of distance value from the digital value, ILD1750
Please refer to the operating instructions for the laser-optical displacement sensors optoNCDT 1750 for more information, especially
about possible output values. The current version is available at:
https://www.micro-epsilon.de/download/manuals/man--optoNCDT-1750--en.pdf

 Loading...
Loading...