Page 42
Annex | Sensor Values, Data Format, Conversion
IF2030/ENETIP
A 3.11 MSC7602
Baud rate 256000 baud ex factory, [9600 ... 256000] RS485 half duplex Measurements ex factory scaled to analog value,
Little Endian
Bus address 126 [2 ... 126]
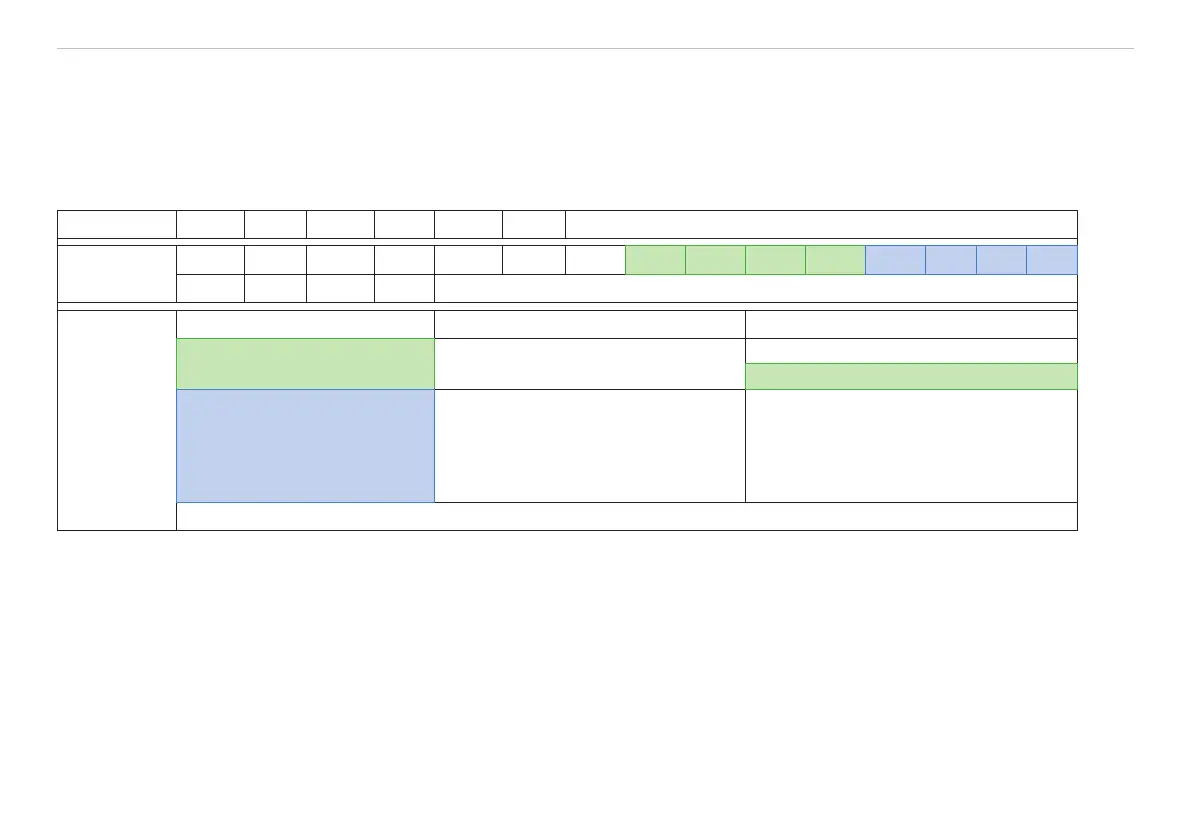
Sequence for a measurement value request:
Send 0x10 0x7E
1
0x01
2
0x4C 0xCB
3
0x16
Receive 0x68 0x0B 0x0B 0x68 0x01
2
0x7E
1
0x08 0xAE 0x47 0x61 0x3F 0x00 0x00 0x00 0x00
0x1C
4
0x16
Result Description Format Example
Unscaled value Bytes 8 - 11:
4 Bytes, float, Little-Endian
0x3F6147AE (float)
= 0.88 V
Scaled value Bytes 12 - 15:
4 Bytes, float, Little-Endian
If this value is 0, the controller was not
set up. Otherwise, the digital counter-
part of the analog output will be sent
according the setting you have done in
the controller before.
Maximum speed for data transmission (1x send + 1x receive): ~3 ms @ 256.000 Baud
1) DA: 126 3) CH: Checksum Send: Bytes 2 - 4
2) SA: 1 4) CH: Checksum Receive: Bytes 5 - 15
Fig. 22 Encoding of Measured Data in the Transmission Protocol, MSC7602
Please refer to the operating instructions for the inductive displacement measuring system for more information.
The current version is available at:
https://www.micro-epsilon.de/download/manuals/man--induSENSOR-7xxx--en.pdf

 Loading...
Loading...