8 SYSTEM APPLICATION EXAMPLES
8-120 Application Example 1
8.1.5 Safety program (safety programmable controller)
Create a safety program of the safety programmable controller.
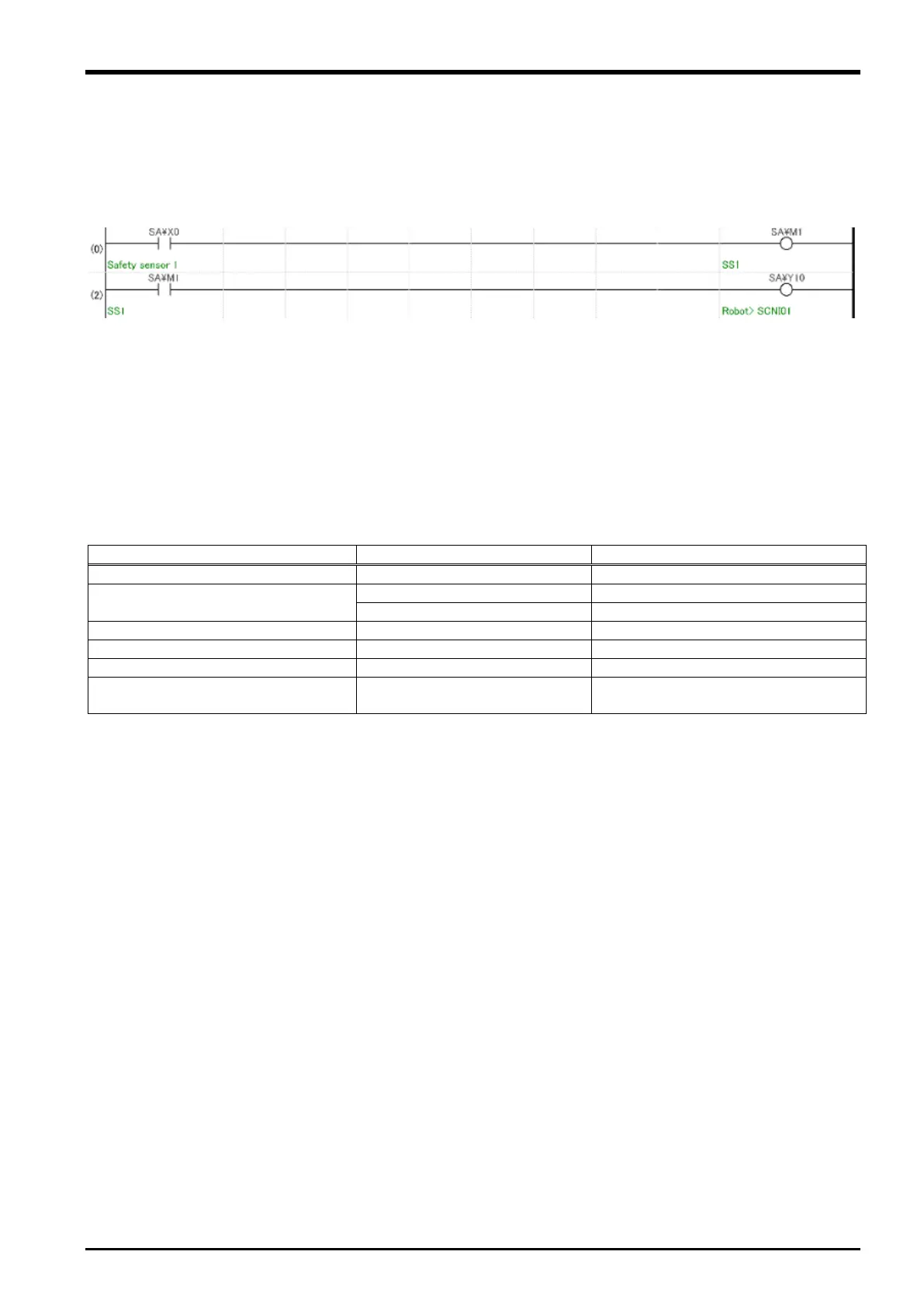
・ When the safety input SA\X0 (safety sensor 1) is ON, the safety internal relay SA\M1 turns ON.
・ When the safety internal relay SA\M1 is ON, the safety output SA\Y10 turns ON.
* In addition, processes such as checking the safety refresh communication status and releasing the safety
station interlock are required.
Fig. 8-4: Program example
8.1.6 Basic configuration (robot controller)
Configure the basic settings of robot controller safety functions.
Table 8-3 Basic configuration
Enable / Disable the Safety Function
Safety Input / Output I/F
Communication partner IP address
Transmission interval monitoring
time
8.1.7 Defining 3D models (robot controller)
Define arm and tool monitoring models.
 Loading...
Loading...



