8 SYSTEM APPLICATION EXAMPLES
Application Example 1 8-121
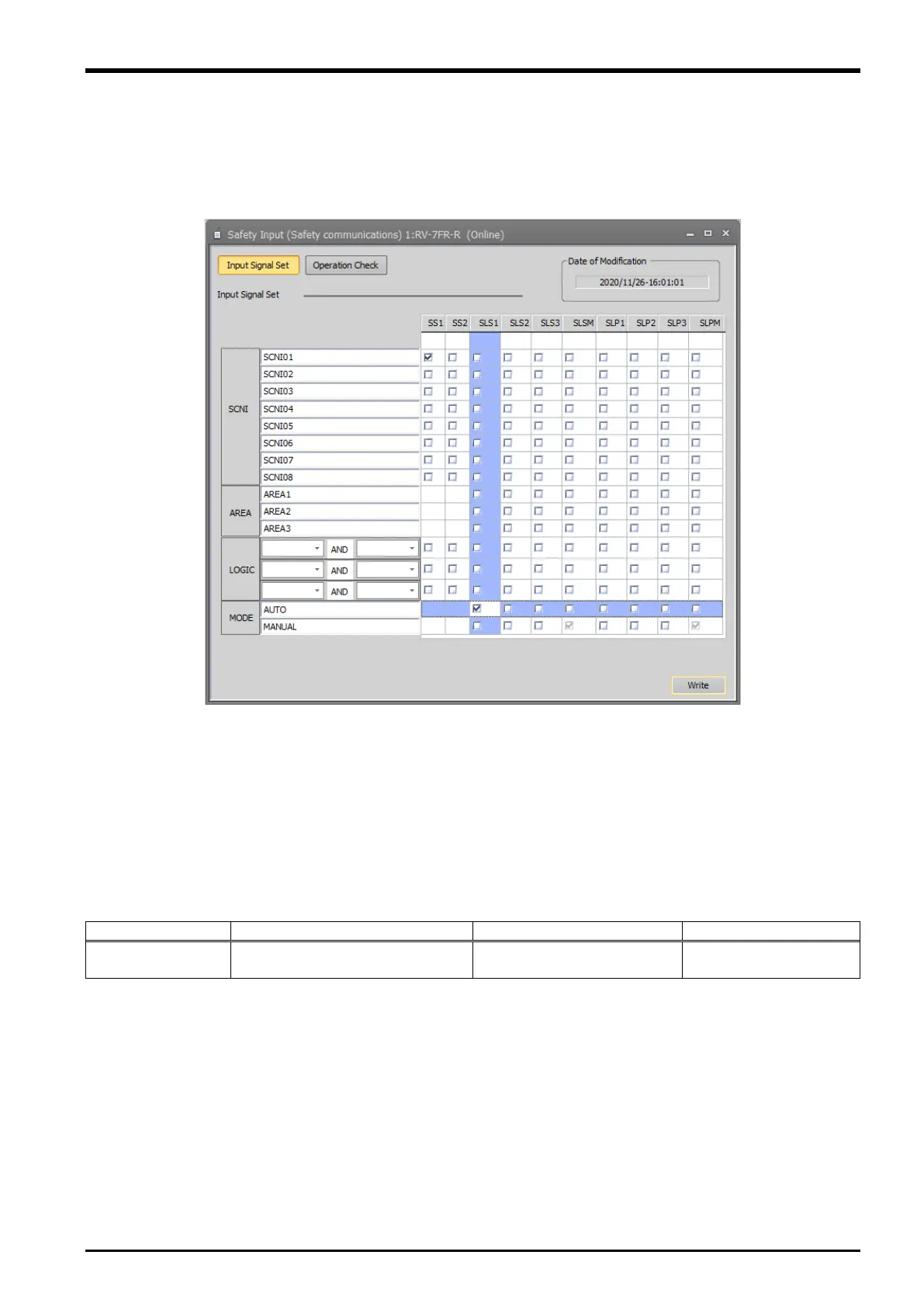
8.1.8 Safety logic edit (robot controller)
Set the safety logic of the robot controller.
・ When safety input SCNI01 is OFF, the SS1 function is activated.
・ When MODE input is AUTO, the SLS1 function is activated.
Fig. 8-5: Safety logic setting example (safety input)
8.1.9 Safety monitoring function settings (robot controller)
Set the safety monitoring function of the robot controller.
Table 8-4 Safety monitoring function settings
XYZ monitoring speed
> Composite speed
 Loading...
Loading...



