1 FUNCTIONS AND CONFIGURATION
System Configuration 1-5
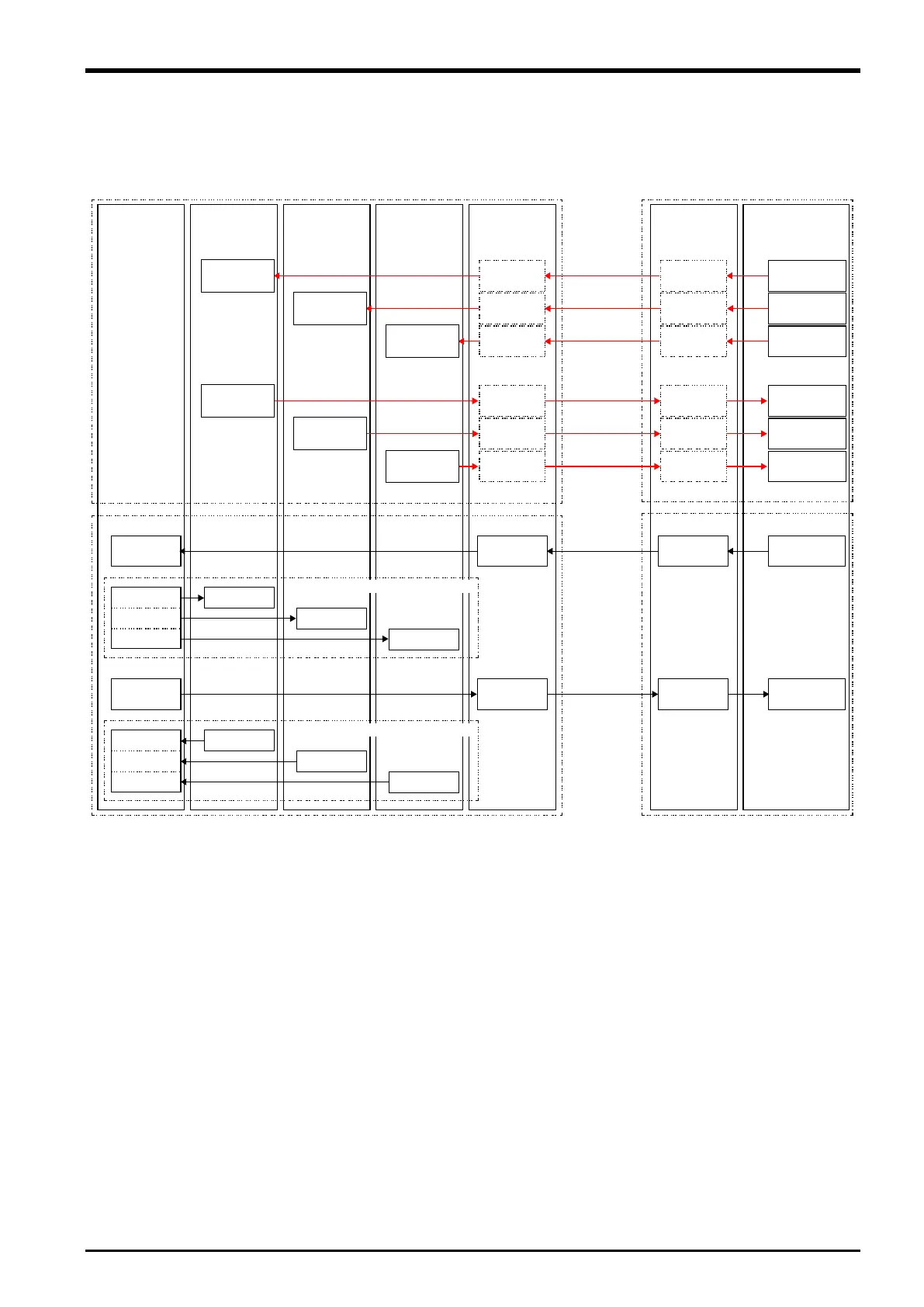
◆ Multiple CPU system
This function allows multiple CPU modules in the multiple CPU system to use one master/local module.
Programmable controller CPU module (CPU No.1) can perform standard communication, and robot CPU module
of robot controllers (CPU No.2 to No.4) can perform safety communication with the master station individually.
Fig. 1-2: Overview of data transfer devices
CPU No.1
Programmable
controller CPU
module
Robot CPU
module 1
Data received
Send data
Robot CPU
module 2
Robot CPU
module 3
Safety CPU
module
Master/local
module
Master/local
module
CPU No.2
SCNI01-08
SCNO01-04
SCNO01-04
SCNO01-04
SCNI01-08
SCNI01-08
CPU No.3 CPU No.4
Station No.1
(local station)
Station No.0
(master station)
Data received
Data received
Send data
Send data
Safety
communication
Standard
communication
000
010
01F
020
02F
00F
000
010
01F
020
02F
00F
SA\Y
SA\X
Y/WRY/RWw
X/WRX/RWr
RX/RWr
Send data
Station No.1 -
CPU No.2
Send data
Station No.1 -
CPU No.3
Send data
Station No.1 -
CPU No.4
Send data
Station No.1
Send data
Station No.1
Data received
Station No.1
Data received
Station No.1
Data received
Station No.1 -
CPU No.2
Data received
Station No.1 -
CPU No.3
Data received
Station No.1 -
CPU No.4
RY/RWw
Data received
Send dataSend data
Devices shared among multiple CPUs
Devices shared among multiple CPUs
Y/W
X/W
Data received
Input signal
Input signal
Input signal
Output signal
Output signal
Output signal
U3E0\HG
U3E1\HG
U3E2\HG
U3E3\HG
 Loading...
Loading...



