4 SAFETY MONITORING FUNCTIONS
Safety Logic Edit 4-37
(2) Area Input
(a) Overview
AREA Input is a state that is enabled (or disabled) when the robot intrudes into or moves outside an area that
is specified beforehand. Configuration of up to three areas is supported.
The relation of the positions of the arm model and tool model, which are defined in Chapter 4.3 , to an area
specified in this sub-section is monitored in real time, which switches AREA Input between the enabled and
disabled states.
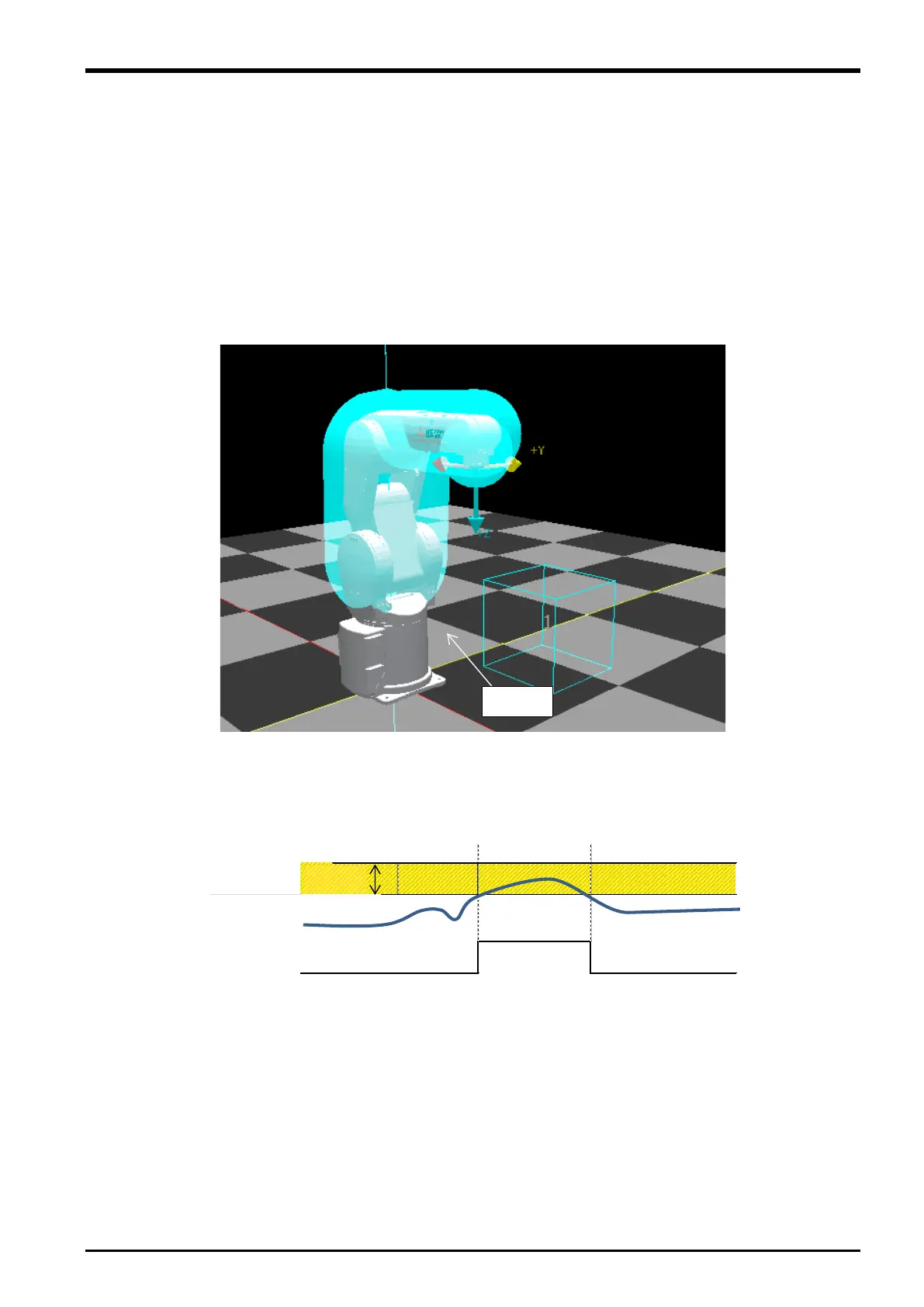
Fig. 4-21: Area input
(b) Timing diagram
Intrusion of a monitoring position of the robot into a specified area enables the AREAn input.
Fig. 4-22: AREA Input timing diagram
 Loading...
Loading...



