4 SAFETY MONITORING FUNCTIONS
4-60 Safety Monitoring Functions
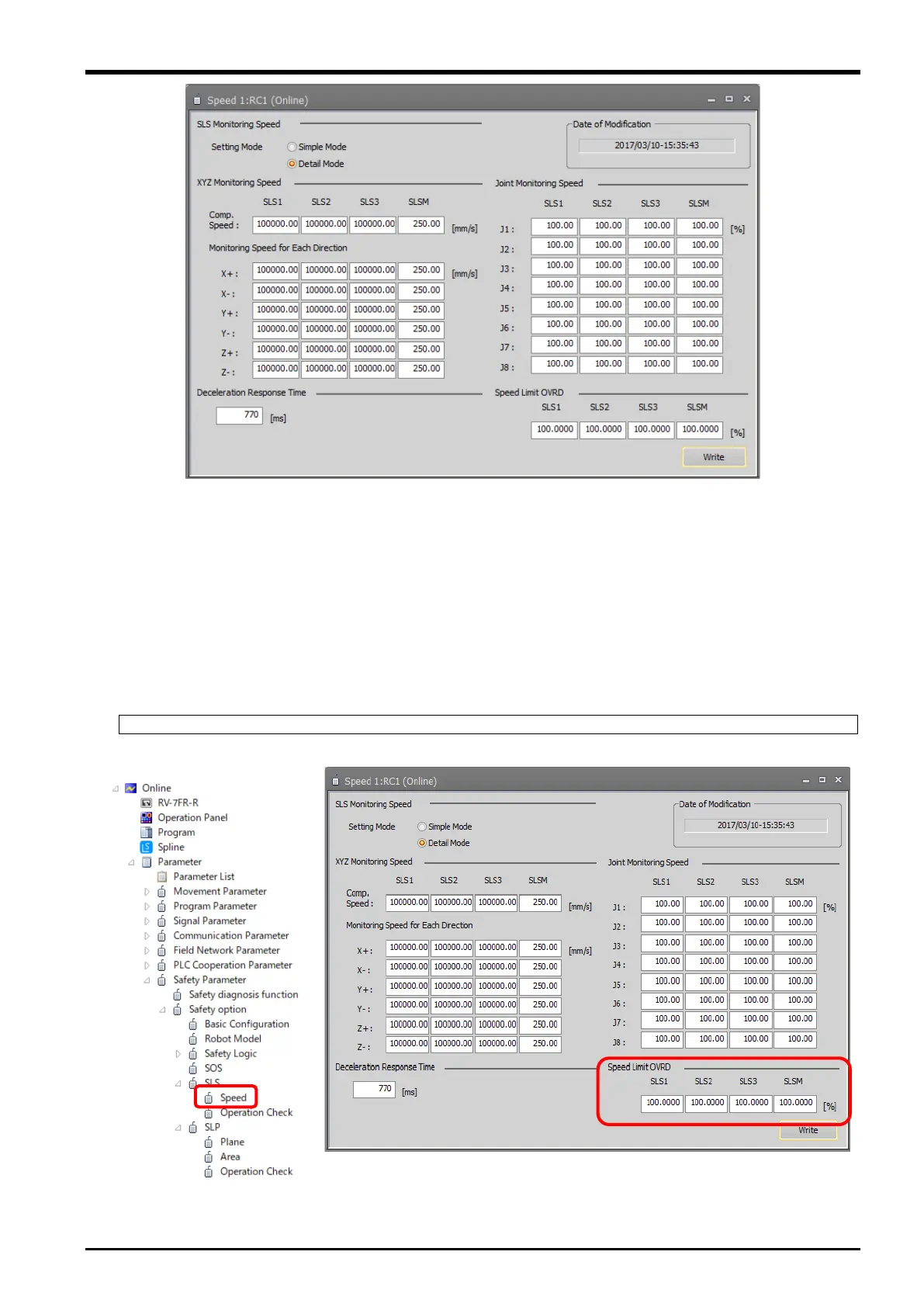
Fig. 4-49: Detail mode of monitoring speed limits
(c) Restricting the movement speed
The speed monitoring restricts the speed of movements made based on the interpolation command with
Speed Limit OVRD specified beforehand. However, if a speed to which Speed Limit OVRD is applied exceeds
the monitoring speed, error H230* (Abnormal SLS joint speed) or error H231* (Abnormal SLS orthogonal
speed) occurs and the SS1 function stops the robot. To avoid errors in such cases, review the settings for
the monitoring speed and Speed Limit OVRD or the speed settings of the robot program (Spd command,
override, etc.).
A movement speed to which Speed Limit OVRD is applied is as follows:
Robot movement speed = Commanded speed specified in the program, etc. × Speed Limit OVRD (%) / 100
Fig. 4-50: Restricting the movement speed
 Loading...
Loading...



